บทคัดย่อ: ความยากของการประมวลผลการหุ้มด้วยเลเซอร์หุ่นยนต์สำหรับการประมวลผลชิ้นงานที่ซับซ้อน เช่น ใบมีด อยู่ที่การใช้ประโยชน์จากลักษณะความแม่นยำสูง และข้อได้เปรียบด้านสถาปัตยกรรมทางเทคนิคของ iRobotCAM ที่ใช้เคอร์เนล 3D CAD สามารถตอบสนองความต้องการความแม่นยำสูงได้อย่างมีประสิทธิภาพ จึงสามารถบรรลุการประมวลผลการหุ้มด้วยเลเซอร์ความแม่นยำสูงของใบมีดห้าแกนได้
การออกแบบและการประมวลผลของใบพัดจะต้องปรับให้เข้ากับสถานการณ์เฉพาะตามสถานการณ์การใช้งานที่แตกต่างกันตั้งแต่ใบพัดพัดลมขนาดเล็กไปจนถึงใบพัดเครื่องบินตามสถานการณ์การใช้งานที่แตกต่างกันของผลิตภัณฑ์อุตสาหกรรมองค์ประกอบการออกแบบจะแตกต่างกันบางอย่างต้องการที่เน้นความสวยงามบางอย่างต้องการความเงียบบางอย่างต้องการตามประสิทธิภาพการทำงานและไม่ว่าใบพัดจะตอบสนองความต้องการในที่สุดหรือไม่นั้นเกี่ยวข้องกับความต้องการของอุตสาหกรรมต่างๆ รวมถึงข้อกำหนดของวิธีการประมวลผลที่แตกต่างกันแกนกลางคือการควบคุมความแม่นยำมีเพียงความแม่นยำเท่านั้นที่ควบคุมได้อย่างมีประสิทธิภาพ มีวิธีที่จะตอบสนองความต้องการของสถานการณ์ต่างๆ หากนำการประมวลผลการหุ้มใบมีดด้วยเลเซอร์แบบหุ่นยนต์มาเป็นตัวอย่าง iRobotCAM จะใช้ประโยชน์จากสถาปัตยกรรมที่ใช้ CAD และมีข้อได้เปรียบของสถาปัตยกรรมที่มีความแม่นยำสูง เราจะนำไปใช้กับการประมวลผลการหุ้มใบมีดด้วยเลเซอร์ได้อย่างมีประสิทธิภาพได้อย่างไร
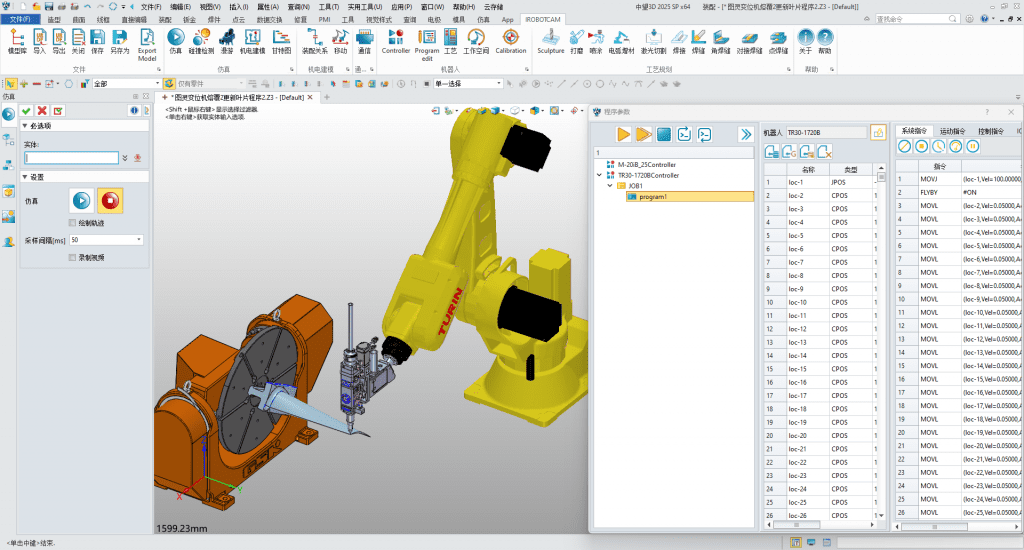
สำหรับการใช้งานการประมวลผลด้วยเลเซอร์แบบหุ่นยนต์ กระบวนการทั่วไปจะเป็นดังต่อไปนี้:
นำเข้าหุ่นยนต์และชิ้นงาน > การวางตำแหน่งชิ้นงานและการปรับเทียบหุ่นยนต์ > ดำเนินการโปรแกรมเส้นทางการเคลื่อนที่ > การจำลองฉากทั้งหมด > เอาท์พุตโค้ดและการประมวลผลหุ่นยนต์
- การใช้คุณสมบัติของ iRobotCAM บนแพลตฟอร์ม CAD 3D และการดู 3D ช่วยให้คุณสามารถสร้างแบบจำลองดิจิทัลของสถานการณ์การใช้งานหุ่นยนต์ได้อย่างรวดเร็ว
- การใช้โมดูลเครื่องกลไฟฟ้าของ iRobotCAM และไลบรารีหุ่นยนต์ที่ตั้งค่าไว้ล่วงหน้า ช่วยให้คุณสามารถกำหนดหุ่นยนต์ เครื่องมือ ฯลฯ ที่เกี่ยวข้องสำหรับฉากหุ่นยนต์ได้
- ตามความต้องการของกระบวนการประมวลผลด้วยเลเซอร์ วิถีการเคลื่อนที่ 2 แกนถึง 5 แกนต่างๆ จะถูกสร้างขึ้นเพื่อตอบสนองความต้องการวิถีการเคลื่อนที่ของสถานการณ์เฉพาะ
- โดยใช้หลักฟิสิกส์ของ iRobotCAM จะทำการจำลองการเคลื่อนไหวของหุ่นยนต์ ปรับเทียบ และส่งออกโค้ดการทำงานที่สอดคล้องกัน
นอกเหนือจากสถาปัตยกรรมทางเทคนิคแล้ว การรับรู้โดยตรงของผู้ใช้มากที่สุดคือความง่ายในการเขียนโปรแกรมซอฟต์แวร์หุ่นยนต์ และประสบการณ์ของผู้ใช้เป็นหนึ่งในตัวบ่งชี้หลัก หากจะพูดตรงๆ ความก้าวหน้าของซอฟต์แวร์อุตสาหกรรมไม่ได้เกิดขึ้นเพียงวันเดียว แต่ตั้งแต่สถาปัตยกรรมทางเทคนิคไปจนถึงประสบการณ์ของผู้ใช้ ซอฟต์แวร์อุตสาหกรรมในประเทศได้ก้าวหน้าไปอย่างมากในช่วงไม่กี่ปีที่ผ่านมา ด้วยซอฟต์แวร์จากต่างประเทศที่สั่งสมมายาวนานหลายปี คุณอาจลองใช้ซอฟต์แวร์อุตสาหกรรมในประเทศดูก็ได้ หากต้องการเลือกซอฟต์แวร์การเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ คุณอาจลองใช้ iRobotCAM ดูก็ได้
โดยการใช้หุ่นยนต์ Turin ในการประมวลผลเครื่องตัดเลเซอร์ใบมีด 5 แกนเป็นตัวอย่าง iRobotCAM จะสามารถประมวลผลหุ่นยนต์เลเซอร์แบบขั้นตอนต่อขั้นตอนได้อย่างง่ายดายอย่างไร
เกี่ยวกับ Yueqing Technology
Yueqing Technology มุ่งมั่นที่จะสร้างแพลตฟอร์มการเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ iRobotCAM แบบเปิด ซึ่งเป็นโซลูชันดิจิทัลที่ผสานการออกแบบแนวความคิดด้านไฟฟ้ากลของสายการผลิต การจำลองการเขียนโปรแกรมการประมวลผลหุ่นยนต์ และการแก้จุดบกพร่องแบบเสมือน
เว็บไซต์ iRobotCAM:www.iRobotCAM.com