The rapid development of embodied intelligence has led to a flourishing of designs, ranging from bipedal robots and ducks to quadrupedal robots and even quadrupedal unicorns. The core logic behind these diverse forms lies in the design of intelligent agents. The key to this success lies in rapidly transforming structurally based models into models designed for embodied intelligent robots. This is precisely the motivation behind Yueqing Technology’s iRobotCAM, a software tool that quickly bridges the gap between structural and embodied intelligent design, and arguably the simplest embodied intelligent robot design and simulation software on the market.
Currently, the open-source community features models such as humanoid robots like Lingxi Robotics and quadruped robots like Boston Dynamics. We will take Boston Dynamics’ quadruped robot dog as an example to briefly explain how to design and simulate a robot step by step.
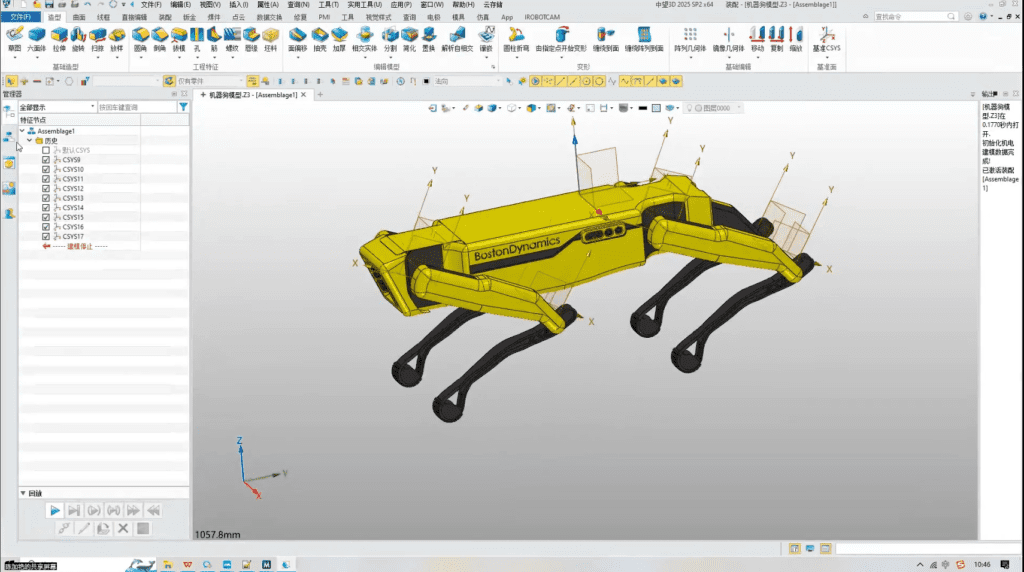
1. iRobotCAM is based on a 3D geometry kernel technology architecture, which can import data formats from various 3D software, including Catia, Solidworks, NX, Creo, Inventor, etc. By importing robot dog files from Solidworks or Step using multiple files, a 3D structural diagram of a quadruped robot can be created in iRobotCAM.
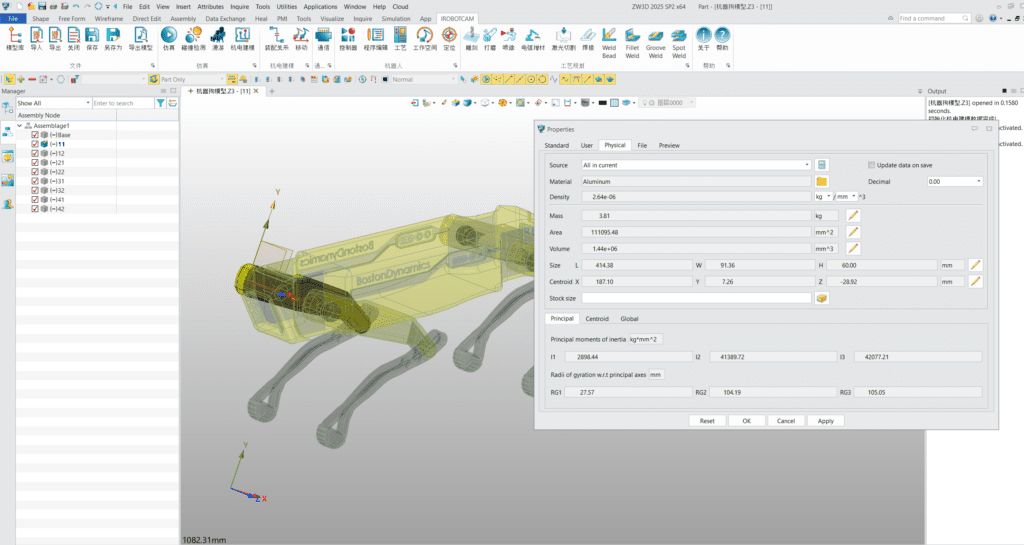
2. Utilizing convenient assembly management functions, material properties for each part can be quickly set, and physical characteristics such as inertia can be calculated.
3. iRobotCAM, as a professional robot design and simulation software, utilizes electromechanical design functions to create electromechanical objects and kinematic pairs, including collision detection.
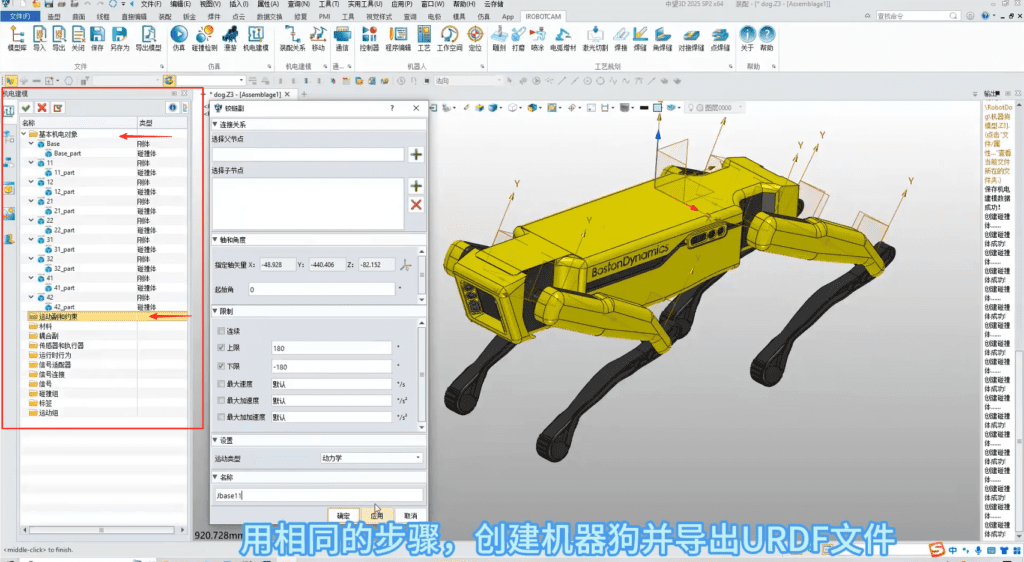
4. By utilizing the convenient skeletal robot joint design panel, all joint mechanisms of the robot can be connected to form a complete embodied intelligent general-purpose robot.

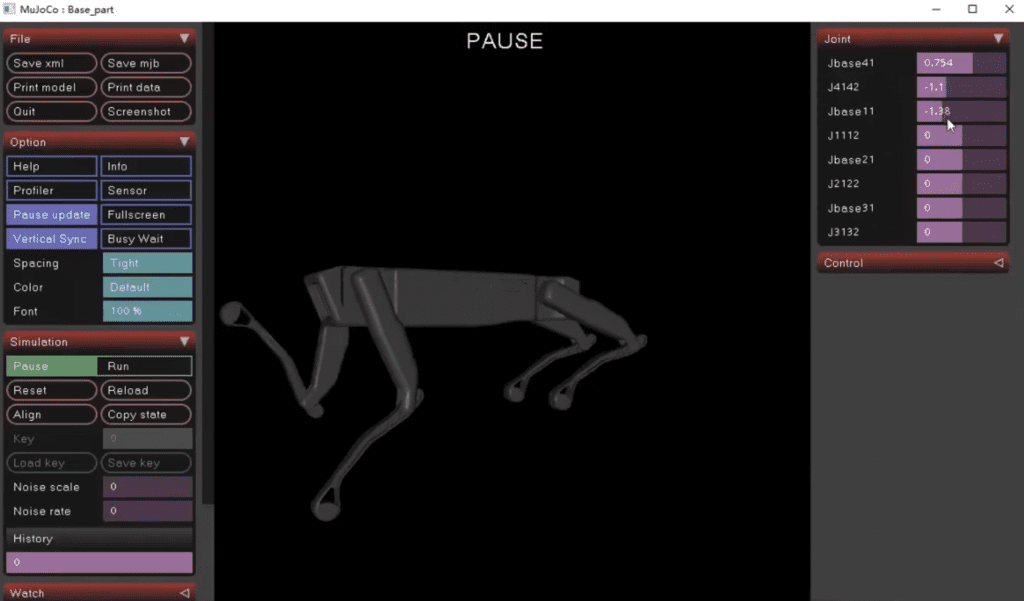
5. Utilizing iRobotCAM’s convenient URDF import and export functions, a universal URDF file can be generated to seamlessly meet the simulation needs of mainstream biomechanics engines such as MuJoCo, Simbody, OpenSim, and Isaac sim.
Using the iRobotCAM robot design tool, robot design and simulation are no longer cumbersome. At the same time, the robot’s structural design can be updated at any time based on the design requirements of the embodied intelligent robot or the feedback from simulation data. Through continuous verification of design and simulation, a robot that meets the requirements can be finally formed.
About Nanjing Yueqing Information Technology Co., Ltd.
Nanjing Yueqing Technology is committed to creating the open iRobotCAM embodied intelligent robot design, programming and simulation platform, which is a digital solution integrating production line electromechanical concept design, offline programming and virtual debugging, robot modeling and training.
iRobotCAM website: www.iRobotCAM.com, contact email: cooperation@iRobotCAM.com


