应用案例
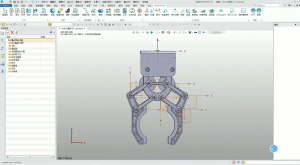
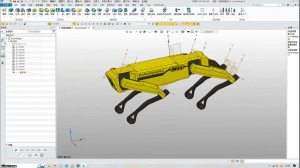
波士顿四足机器狗的设计与仿真,具身智能设计软件iRobotCAM轻松完成
目前开源社区上,有包括灵犀机器人等人形机器人为代表的模型,也有波士顿为代表的四足机器人等,我们以开源社区的波士顿的四足机器狗为例,一步步的简要阐述如何实现机器人的设计与仿真。
应用案例
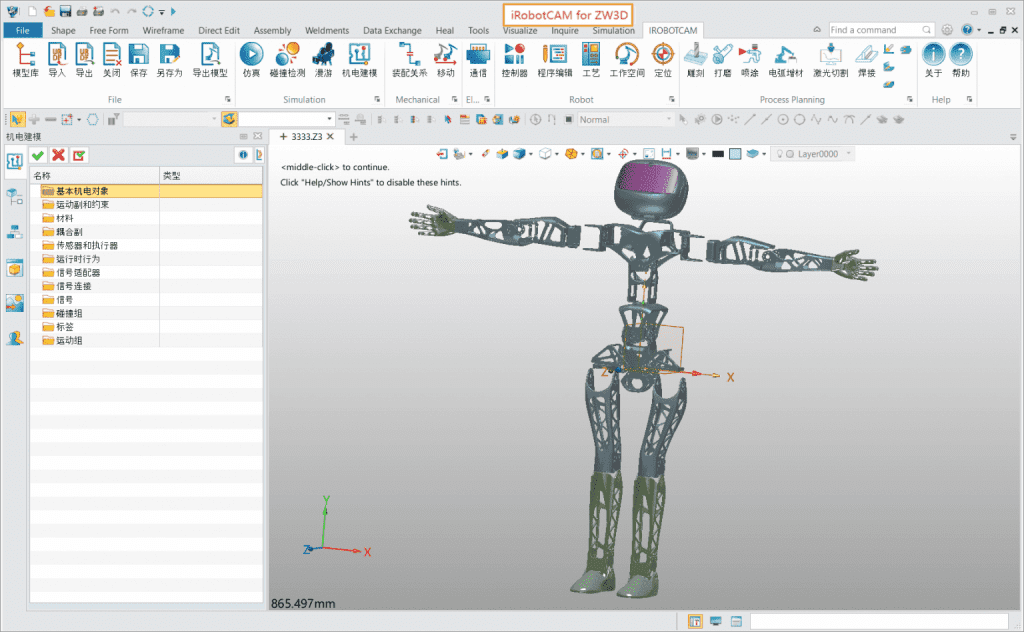
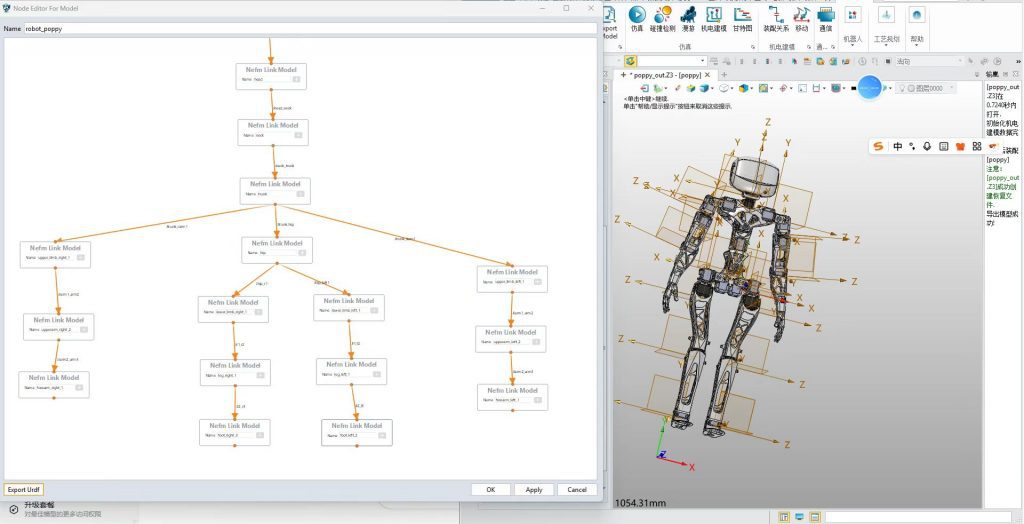
iRobotCAM 如何完成人形机器人的设计与URDF的输出,无缝对接MuJoCo仿真
人形机器人的设计与仿真是全民关注的话题,主要在于其人的形状,与人类的同理心产生共鸣,而对于人形机器人的研究与学习也吸引着越来越多的机器人兴趣者的参与,而如何快速的设计一款人形机器人是一个行业卡点,iRobotCAM机器人与仿真软件应运而生,机器人设计与仿真轻松上手。
技术应用
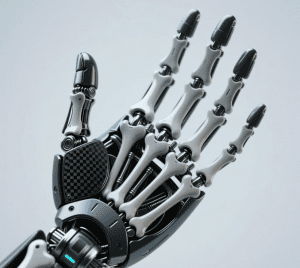
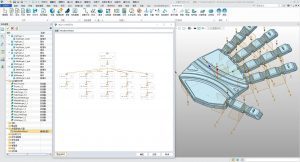
具身智能灵巧手设计与仿真,如何用iRobotCAM轻松完成
具身智能的行业发展极其迅猛 ,而各种形态的具身智能研究极为火爆,如何快速的验证具身智能设计的合理性是一个行业共性问题,而iRobotCAM正是为解决这个问题而开发,快速上手,轻松完成。

公司新闻
足球运动科学新标杆——越擎科技发布iRobotCAM多体动力学技术,重塑足球联赛训练体系
在江苏城市足球等联赛上,运动员凭借高水平竞技,全民关注度的不断攀升,然而,诸如这类赛试,高强度的对抗与紧凑的赛程,也让运动员的伤病管理和竞技水平提升面临巨大挑战,南京越擎信息科技有限公司自主研发的机器人离线编程与仿真平台 ——iRobotCAM,凭借其卓越的多体动力学建模能力与生物力学接口支持,提供足球运动康复与训练分析的全新解决方案。


