Abstract: Wuhan Needs Intelligence has reached a cooperation with Nanjing Yueqing Technology to realize the digital twin prototype of the robot, demonstrate the correlation between robot teaching and robot application programming, and intuitively demonstrate the application scenarios of the robot.
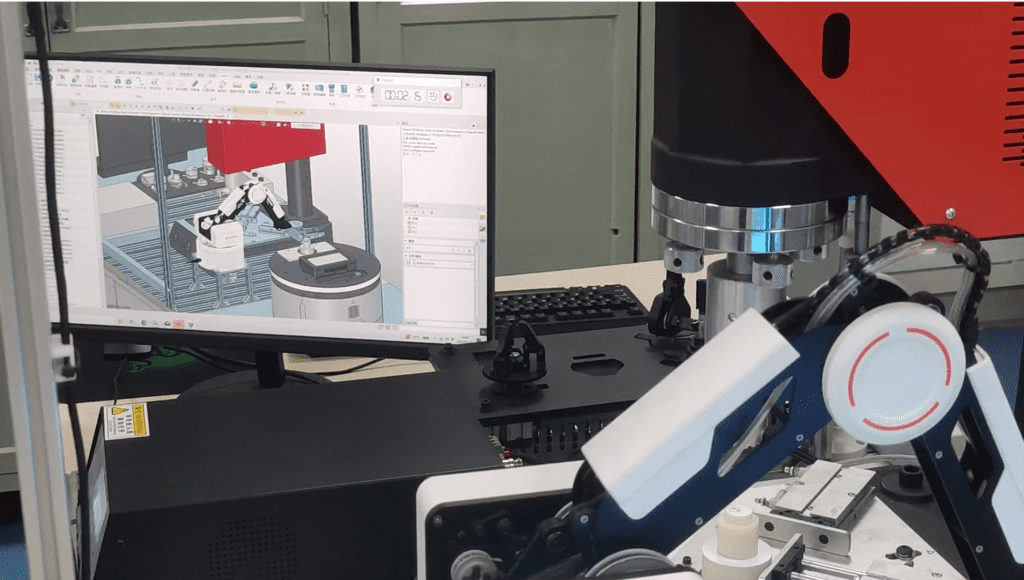
Wuhan Needs Intelligence has reached a cooperation with Nanjing Yueqing Technology to realize digital twins of the physical world and the virtual world for robot application scenarios, realize iRobotCAM robot offline programming software and PLC communication of robots that need intelligence, precise control of joint movements, etc., using digital The twin application model shows the correlation between robot teaching and robot application programming, and intuitively displays the application scenarios of robots.
For the application of digital twins, there are currently two different technical routes in the industry.
The virtual reality route that focuses on simulation effects generally uses game engines such as Unity as the basic technology, and further develops based on industry characteristics to customize the required simulation application effects.
Based on physical modeling, by establishing a bridge between the physical world and the virtual world, the interaction between reality and virtuality is realized, and a true digital twin is realized.
In terms of technology application, the digital twin world formed by modeling the physical world often requires more R&D investment in the face of discrete abstract models of key elements of the physical real world. However, for industrial applications, This true digital twin architecture has higher value. It can effectively present complex physical scenes in the virtual world, and can also further drive changes in the physical world through further virtual debugging of robots.
For the application fields of industrial robots, in terms of the technical selection of iRobotCAM robot offline programming software, iRobotCAM selection is based on CAD data to achieve interoperability between the physical world and the virtual world, and realize true digital twin applications. Specifically, how does iRobotCAM industrial robot offline programming software realize the construction of iRobotCAM’s convenient virtual programming environment?
- Motor assembly simulation, including robots, quick-change devices, conveyor lines, and various sensors
- Virtual and real synchronous simulation, collect production line data, and map motion controller data and PLC data to the simulation system
- Supports system simulation including conveyor lines, multi-robots, and material systems. Supports system simulations including conveyor lines, multi-robots, and material systems.
By quickly building application scenarios and connecting to corresponding communication modules, iRobotCAM can realize robot virtual debugging and digital twin application scenarios.
About iRobotCAM:
Yueqing technology is dedicated on developing the all-in-one solution for production line design, robot offline programming and virtual debugging.
iRobotCAM website: www.iRobotCAM.com,Email: cooperation@iRobotCAM.com


