摘要:新版本速递,基于国产三维几何内核的中望3D平台,iRobotCAM机器人离线编程软件V1.1正式发布
自从全国产机器人离线编程软件iRobotCAM从2023年5月正式发布以来,获得了包括商业用户和教育用户的大泛关注,根据大量的用户的使用和开发反馈,iRobotCAM迎来了第一个版本大更新。
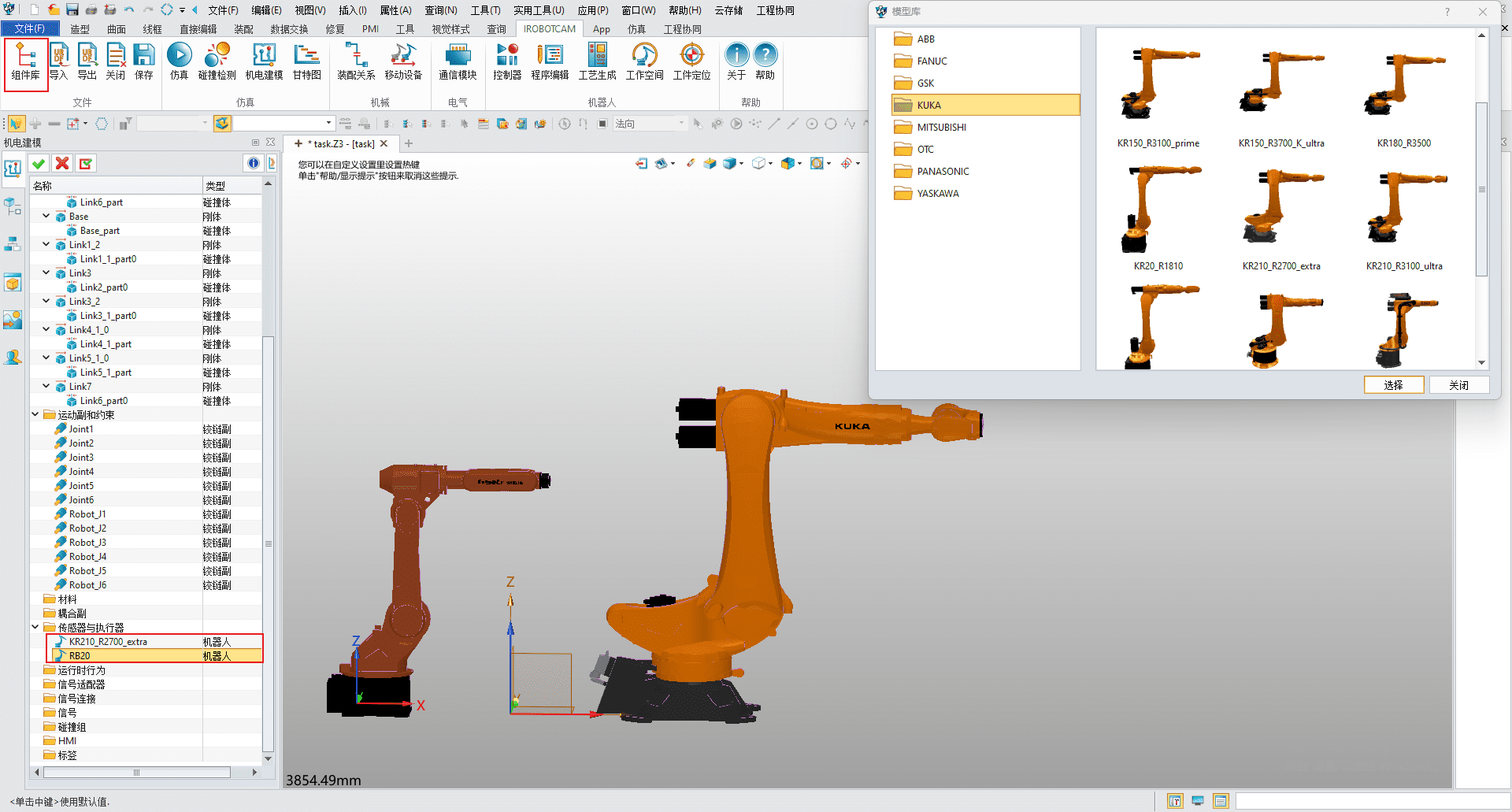
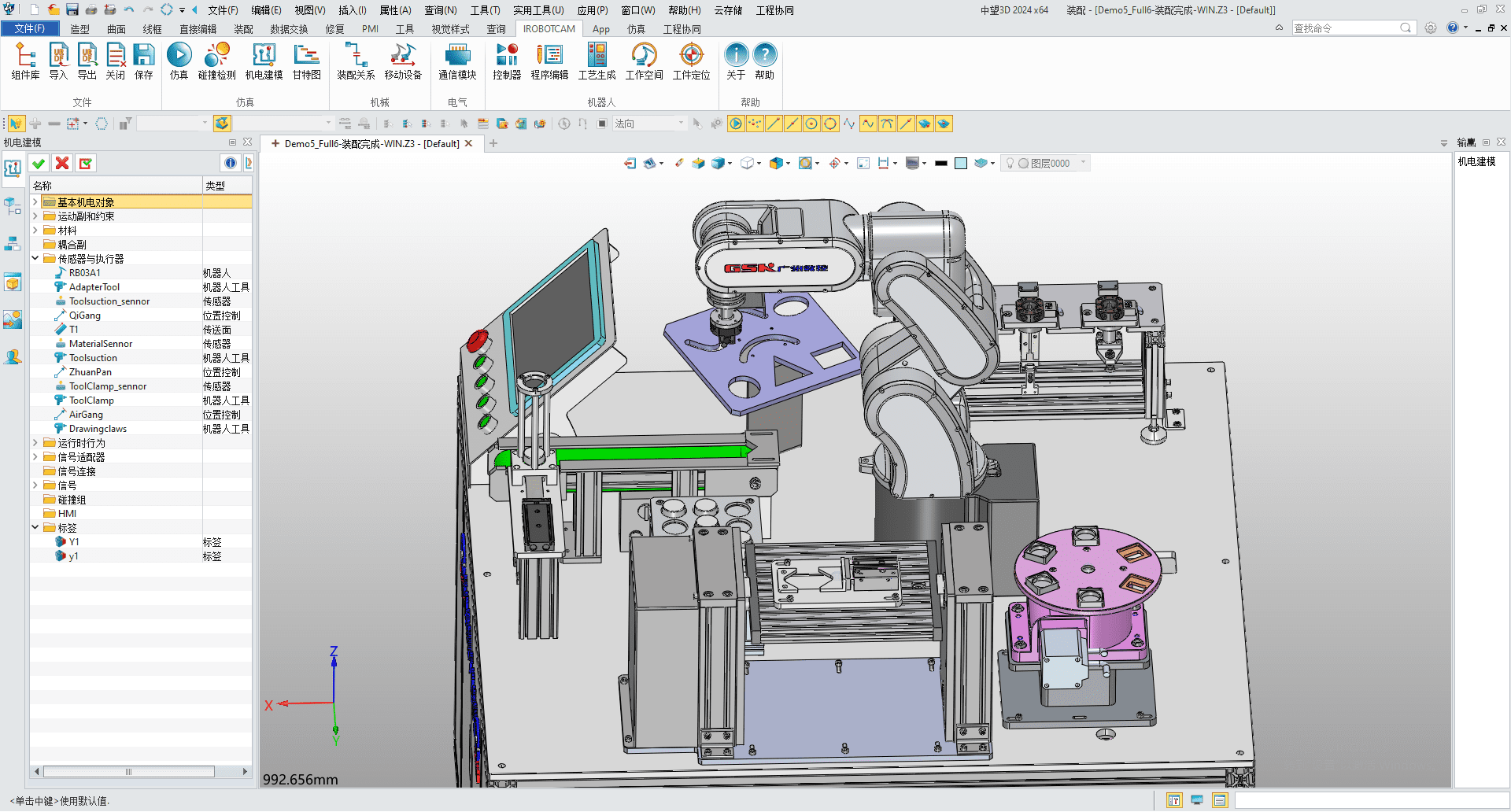
- 大幅提升产品的使用便捷性,iRobotCAM进一步集成内置的机器人库,可以便捷的调出广州数控机器人,KUKA, ABB,Fanuc等机器人模块库
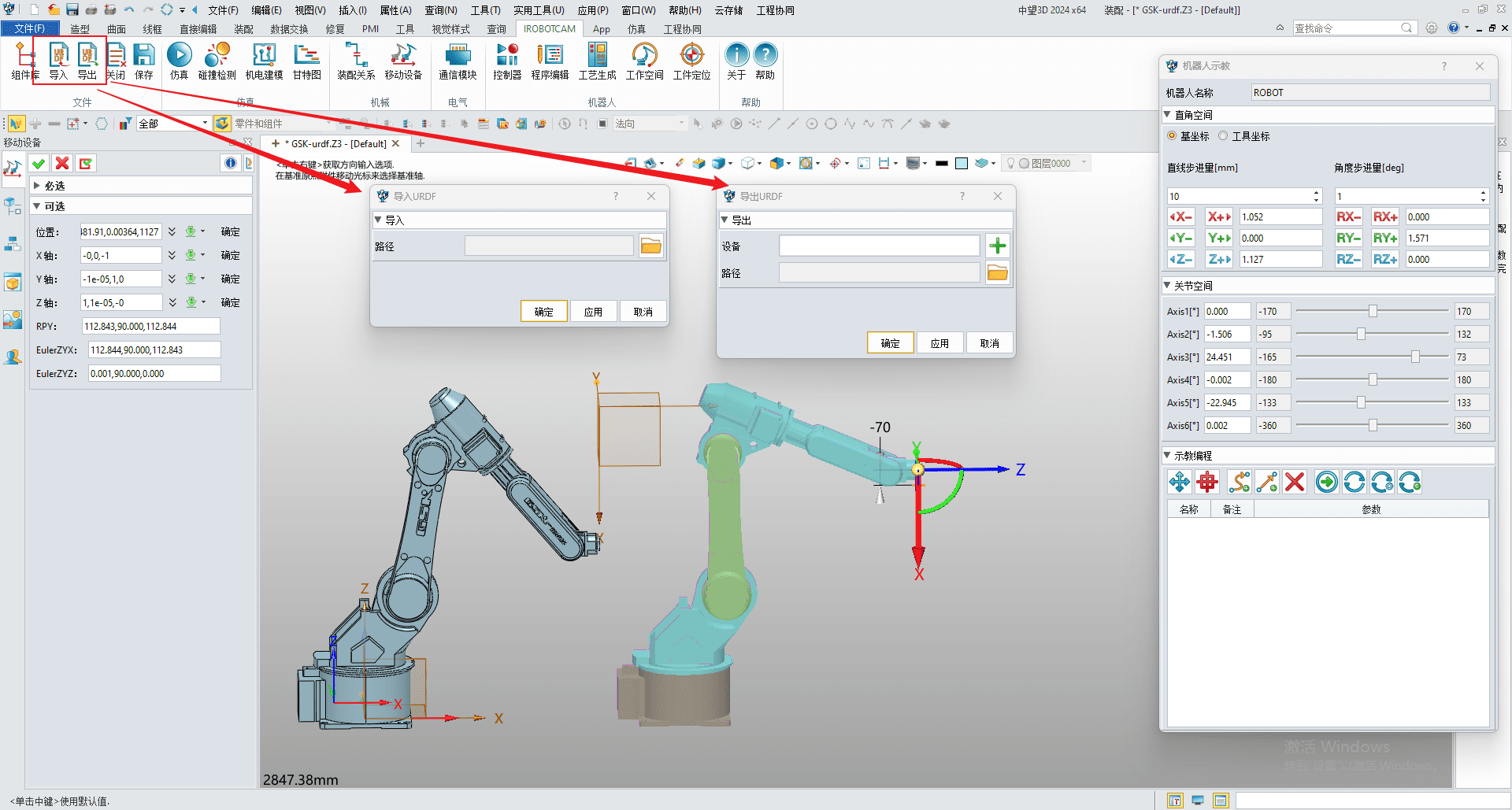
- 提升机器人的关节定义的友好性,机器人定义流程进一步优化,多机器人仿真更便捷
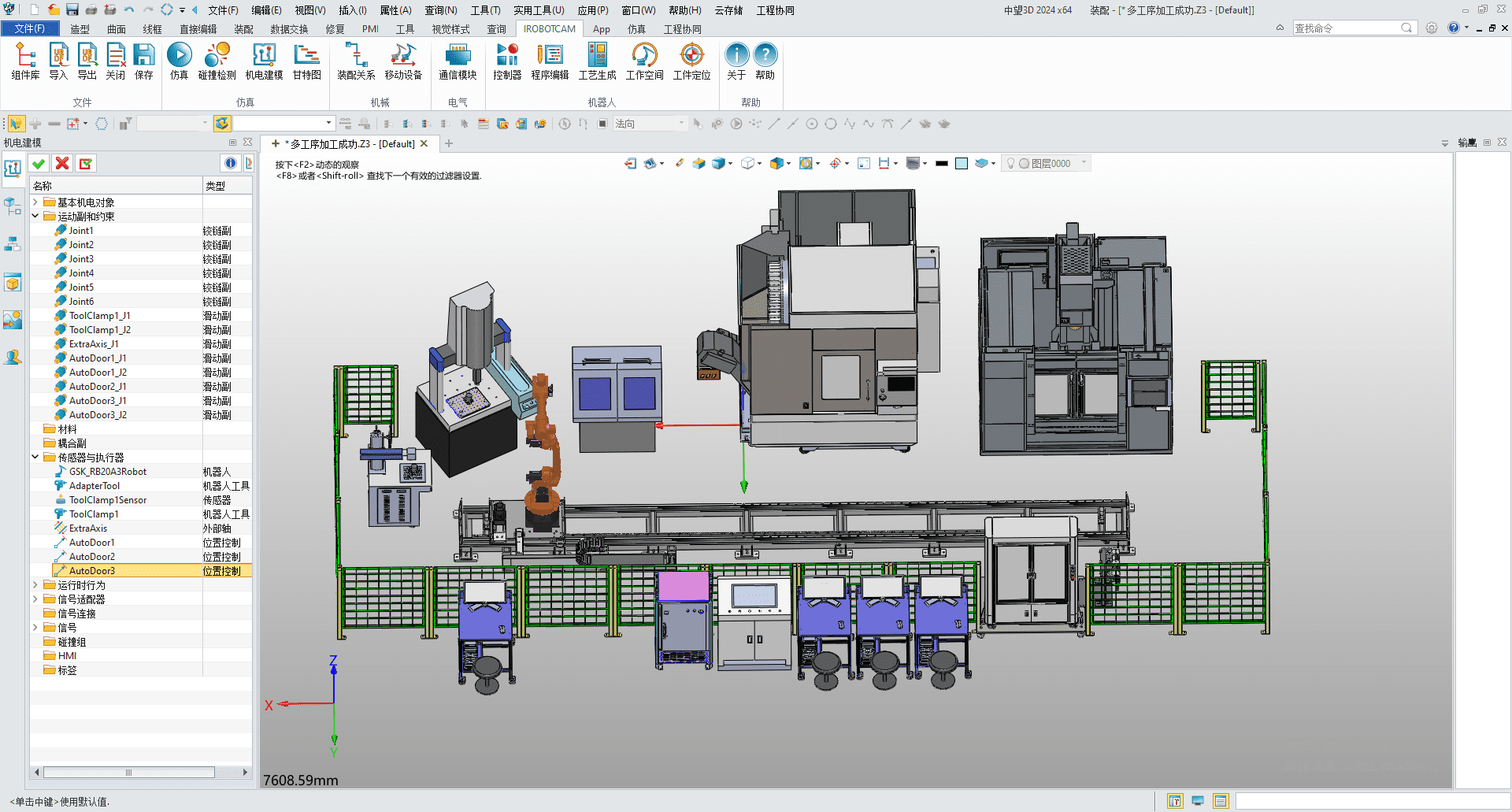
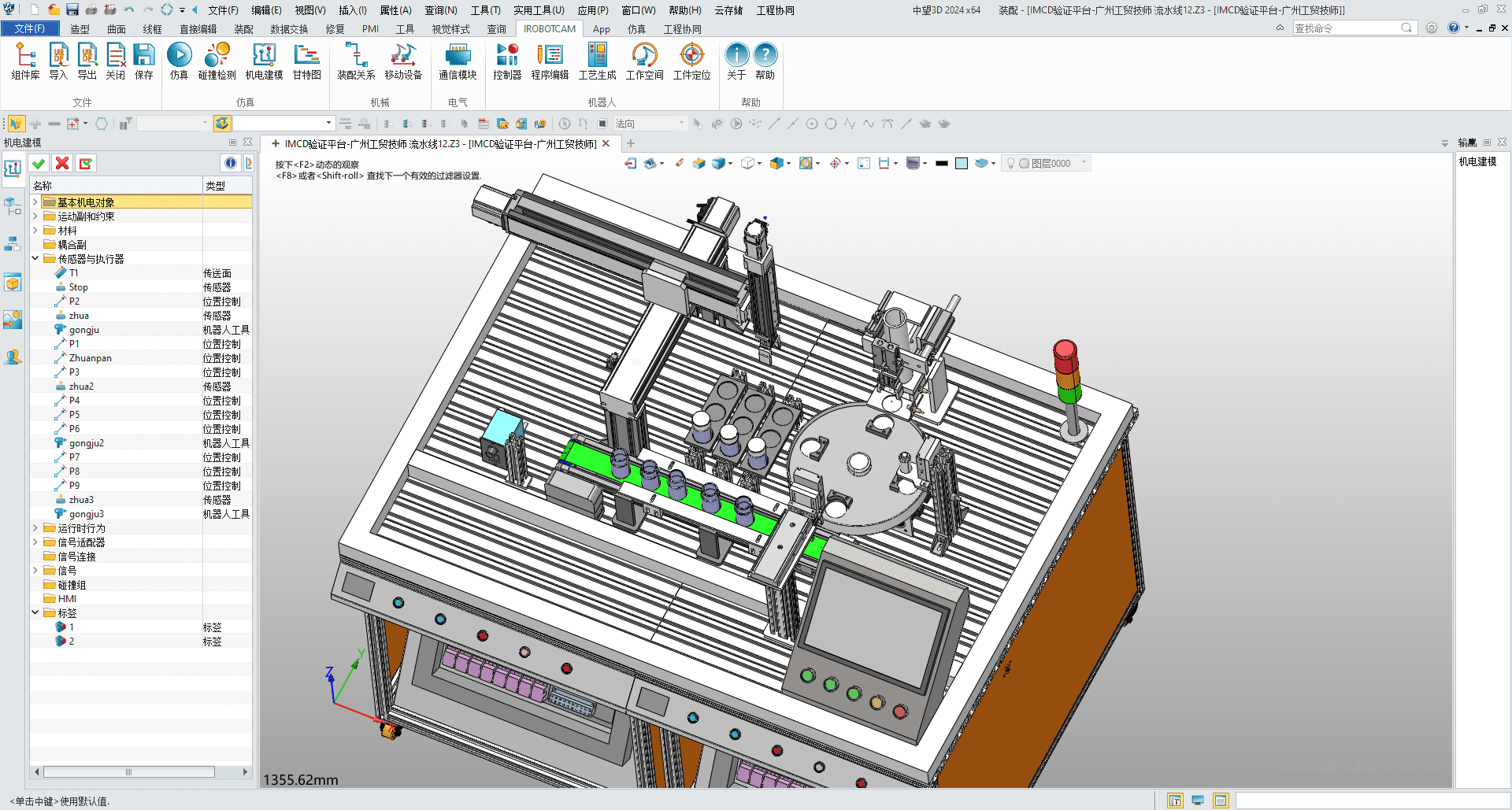
- 提升机器人数字孪生应用的建模能力,机电协同与数字孪生的节拍优化,更好的呈现数字孪生的物理世界和数字世界的连接,同时利用模型精简化,支持URDF导入与导出,提升大模型的数字孪生的交互可行性。
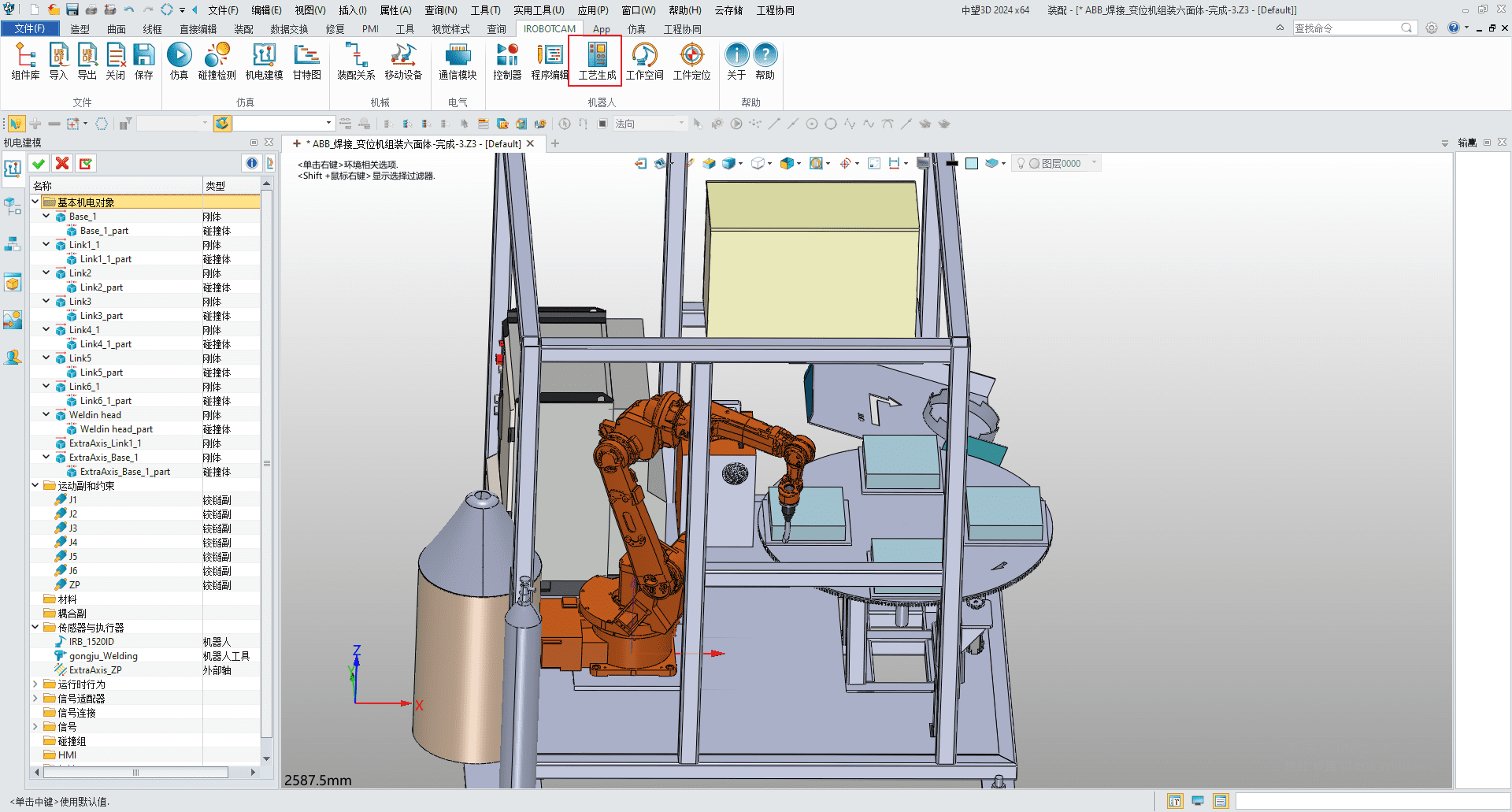
- 机器工的工艺应用更健壮,提升复杂焊接工艺能力,以及多机器人的仿真能力。
“iRobotCAM作为全国产机器人离线编程软件,通过参加全国职业院校技能大赛,大量的职业院校的老师和同学非常认可iRobotCAM对于编程与虚拟调试的应用能力。用户体验的提升是我们近半年产品升级的关键工作,我们期望有更多的院校和同学喜欢上机器人智能制造的创新应用;在企业应用市场,机器人应用的高精度需求以及大体量模型需求,一直是产品能力边界突破的关键点,我们通过了模型库的补充,利用中望3D平台的高精度能力,结合越擎科技对于机器人应用的精简化能力,使得包括搅拌摩擦焊等焊接等高精度复杂工艺应用,多机器人仿真等更简单” ,越擎科技CEO唐怀磊先生总结了本次国产机器人离线编程软件的产品升级重点。
工业软件的研发非一日之功,用户的认可也非一日之功,通过近三年的研发突破,iRobotCAM机器人离线编程与虚拟调试方案,实现了产线设计与仿真,虚拟调试,机器人连接焊,机器人数字孪生等工作,大大增强工业机器人的复杂应用场景。
关于越擎科技:
越擎科技致力于打造开放的iRobotCAM机器人离线编程平台,是集产线机电概念设计以及机器人加工编程仿真,虚拟调试等一体的数字化解决方案.
iRobotCAM网站: www.iRobotCAM.com,联络邮件: cooperation@iRobotCAM.com


