Abstract: Faced with the problem of high threshold and high cost of robot modeling and training platform, Yueqing Technology leverages its own industry technology advantages in robot software to release the robot modeling module based on the 3D geometry kernel, expand the URDF interface, and open up the simulation and analysis of ROS robots.
Faced with the problem of high threshold and high cost of robot modeling and training platform, Yueqing Technology leveraged its industry technical advantages in robot software to release the iRobotCAM robot modeling module based on the 3D geometry kernel platform.
- With the modeling capabilities of iRobotCAM and the capabilities of the self-developed physics engine, iRobotCAM can quickly create and manage robot models and conduct physical simulations.
- With the extended URDF import and export interfaces, iRobotCAM further connects with ROS robots, allowing users to connect robot modeling and robot simulation to train the physical model of robots more effectively.
The following takes the simplest industrial robot as an example to further elaborate on how to use iRobotCAM to realize robot modeling and training model:
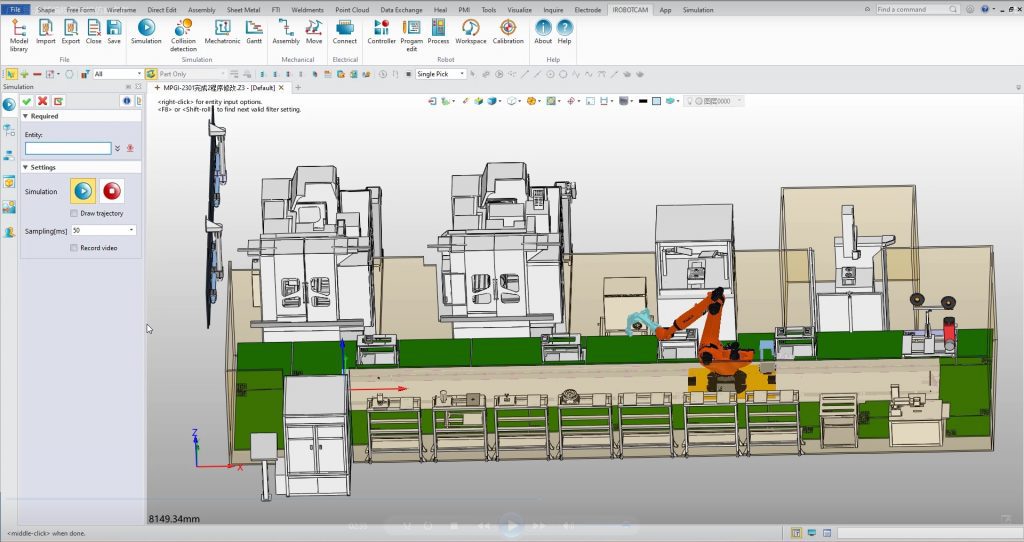
- Digital 3D scene modeling
- Using the 3D modeling function, iRobotCAM can build complex 3D models and complete the modeling of digital scenes.
- Support the import of iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid and other 3D formats, in order to reuse the existing 3D models, improve the efficiency of robot digital scene construction.
- Mechatronic Design & Robotics Library
- Establishment of sensor data environment: support PLC signal systems including Siemens, Mitsubishi, Inovance and other brands, and support customization of more signal access devices
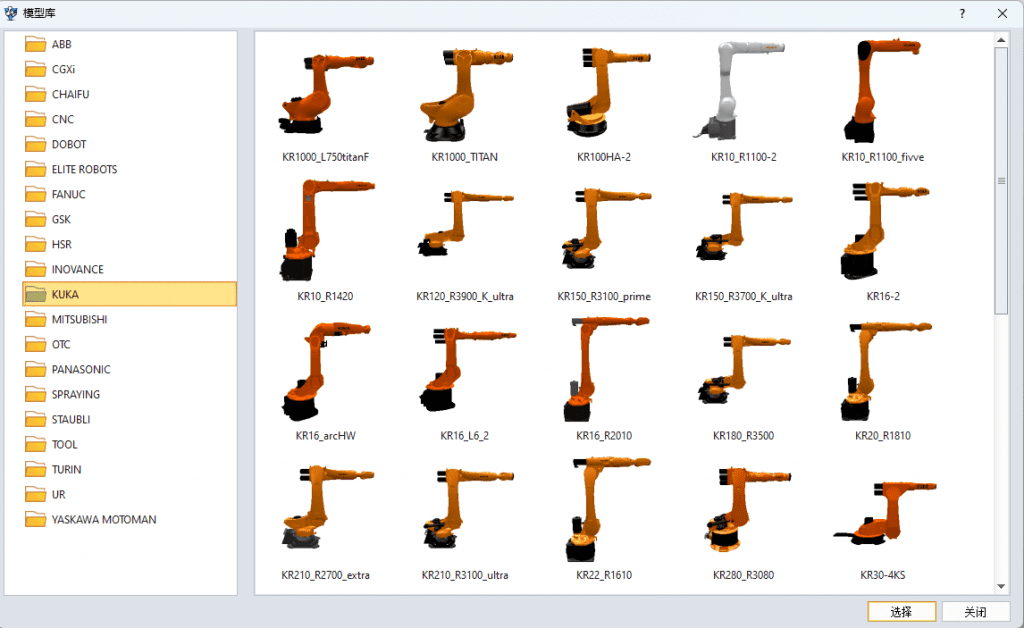
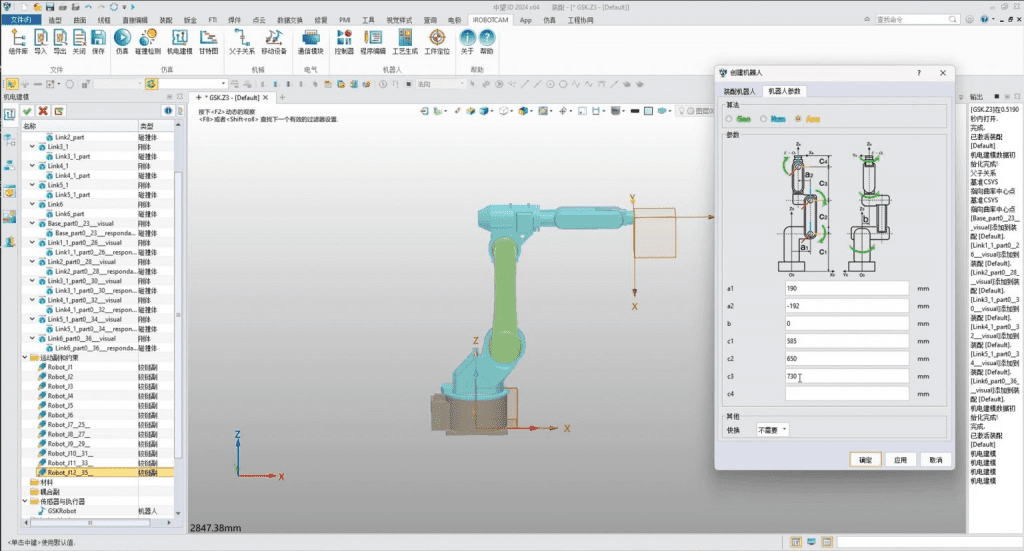
- Establishment of robot library: For industrial robots, you can use the embedded robot libraries including ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO and Turing to establish robot simulation models, or establish your own robot library through robot customization functions. For humanoid or wheeled robots, the detailed joint information of the corresponding parts can be established as needed, and the overall joint definition, collision detection, etc., can be formed to form a complete humanoid or wheeled specific robot library.
- Robot training
- Establishment of robot trajectory planning model: support multi-machine IO communication simulation, multi-robot synchronization, and robot multi-axis linkage planning;
- Training of physical models trained by robots: It supports the simulation of physical characteristics by using its own physics engine, including obstacle avoidance requirements, collision analysis and other data models, and supports the expansion of third-party interfaces to support the training algorithms of robots in specific scenarios.
- Data docking with ROS robots to achieve joint debugging
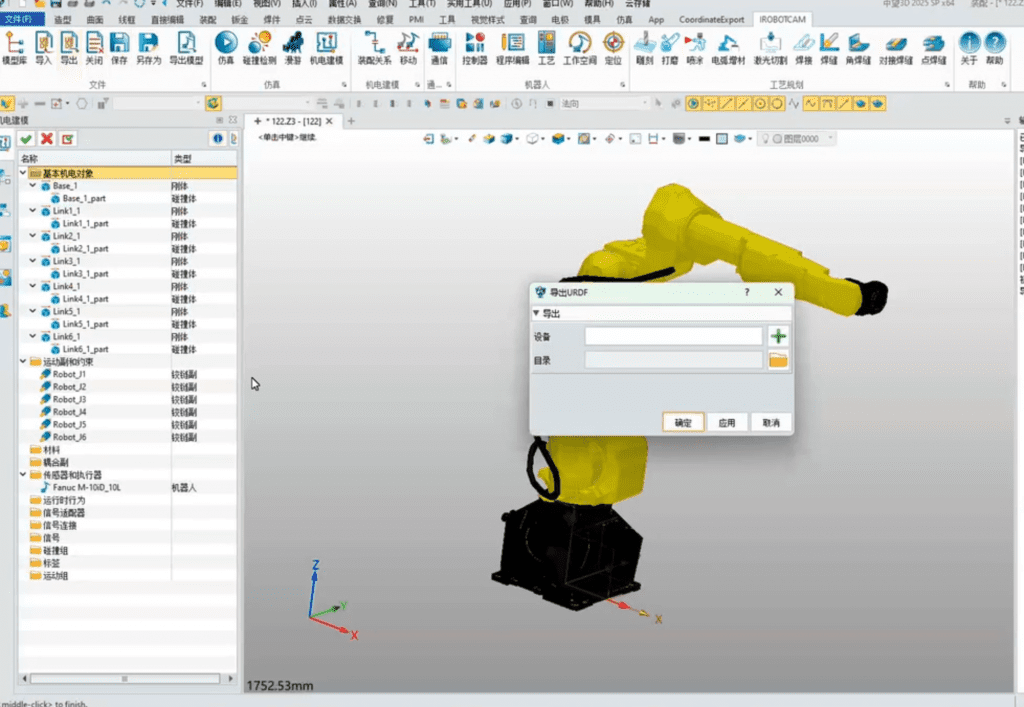
- The robot optimization model completed by iRobotCAM can be exported to URDF for further simulation and execution of ROS robots
- With the import function of URDF, the robot base model can be imported into iRobotCAM, and the robot data environment can be further modified and trained on iRobotCAM to meet the design goals of the robot’s data model.
About Yueqing Technology
Yueqing Technology is committed to building an open iRobotCAM robot offline programming platform, which is a digital solution integrating electromechanical conceptual design of production lines, robot processing programming simulation, and virtual debugging.
iRobotCAM website: www.iRobotCAM.com; Contact: cooperation@iRobotCAM.com


