Streszczenie: Yueqing Technology opublikował dokument techniczny na temat programowania i symulacji obróbki laserowej, w którym opisano trudności związane z precyzyjną kontrolą zastosowań technologii obróbki laserowej, a także omówiono schemat trajektorii i symulacji obróbki laserowej, sposób efektywnego wykorzystania iRobotCAM do ukończenia obróbki laserowej i symulacji oraz znacznej poprawy rozwoju sprzętu scenariuszy zastosowań procesów laserowych i wydajności zastosowań procesów laserowych.
- Przegląd branży laserowej
Branża laserowa ma ogromną skalę zatrudnienia i wielkość przyszłego rynku, a branża ta znajduje się w okresie szybkiego rozwoju.
- Charakterystyka technologii laserowej
Największą cechą procesu laserowego jest wysoka precyzja. Aby lepiej zrozumieć zastosowanie technologii laserowej, zaczynamy od scenariusza wyposażenia zastosowania technologii laserowej i traktujemy rozwój i zastosowanie obrabiarek laserowych i zastosowań obróbki laserowej robotów jako typowe zastosowania, aby dalej analizować jego trudności i dalej wyjaśniać rozwiązania.
Rozwój i zastosowanie obrabiarek laserowych
Rozpoczynając od procesu rozwoju sprzętu obrabiarek laserowych, możemy dalej zrozumieć trudności i rozwiązania zastosowania technologii laserowej w obrabiarkach.
Proces rozwoju obrabiarki laserowej: modelowanie struktury 3D < modelowanie elektromechaniczne i symulacja ruchu < generowanie trajektorii i wirtualne debugowanie < symulacja post-processingu i przetwarzania
Poniżej wykorzystano iRobotCAM jako rozwiązanie programowe do rozwoju i debugowania obrabiarki laserowej, aby wyjaśnić, jak krok po kroku wdrożyć rozwój obrabiarki laserowej i wirtualne debugowanie oraz zrealizować masową produkcję i zastosowanie obrabiarek laserowych.
1) Modelowanie struktury 3D: iRobotCAM wykorzystuje cechy platformy 3D CAD do szybkiego zbudowania cyfrowego modelu struktury 3D obrabiarki.
2) Modelowanie elektromechaniczne i symulacja ruchu: iRobotCAM ma moduł modelowania elektromechanicznego, który może być używany do modelowania i projektowania linii produkcyjnych oraz wirtualnego debugowania robotów. Przed faktyczną produkcją proces obróbki laserowej można symulować w środowisku wirtualnym, aby odkryć i rozwiązać możliwe problemy z wyprzedzeniem, takie jak interferencja kolizji ruchu robota, sprawdzanie osobliwości robota, osiągalności i kolizji oraz błędy ścieżki lasera itp., aby zmniejszyć błędy i ryzyko w rzeczywistym debugowaniu oraz poprawić wydajność i bezpieczeństwo produkcji.
3) Generowanie trajektorii i wirtualne debugowanie: Opracowane na bazie platformy ZW3D, może wykorzystywać różne algorytmy trajektorii ZW3D (od 2 do 5 osi), dzięki czemu robot dysponuje dokładnymi algorytmami trajektorii podobnymi do oprogramowania CAM podczas procesu obróbki laserowej i może dokładnie skupić wiązkę lasera na obrabianej części, realizując precyzyjne cięcie laserowe, spawanie, grawerowanie i inne procesy, zapewniając jakość i spójność obróbki.
4). Postprocessing i symulacja obróbki: wygodny moduł postprocessingu iRobotCAM może szybko generować kod i intuicyjnie wyświetlać efekty symulacji obróbki
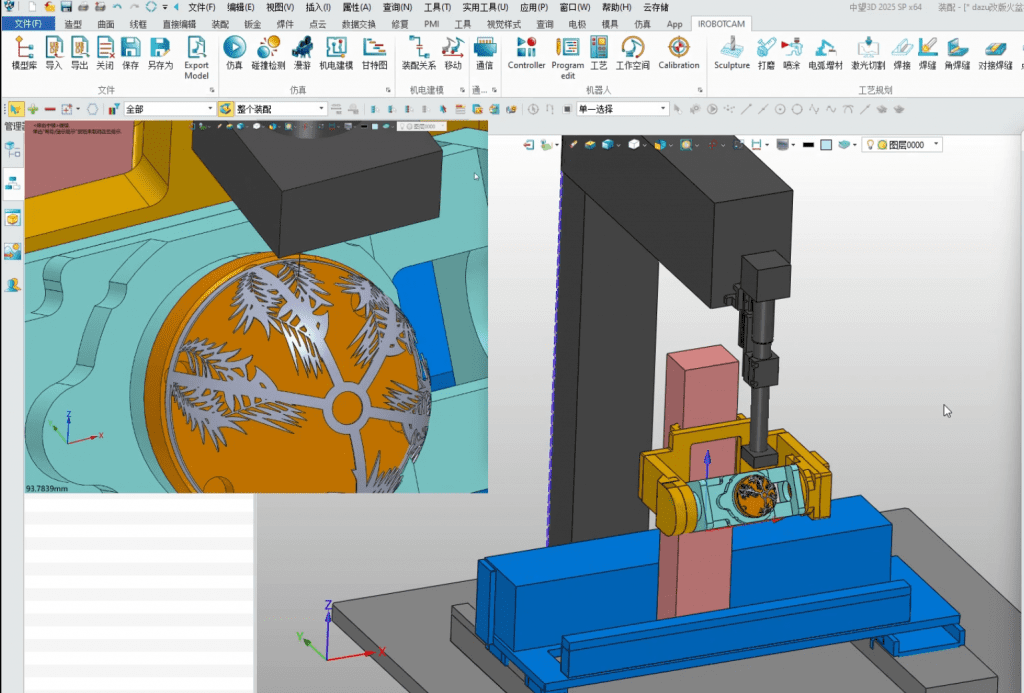
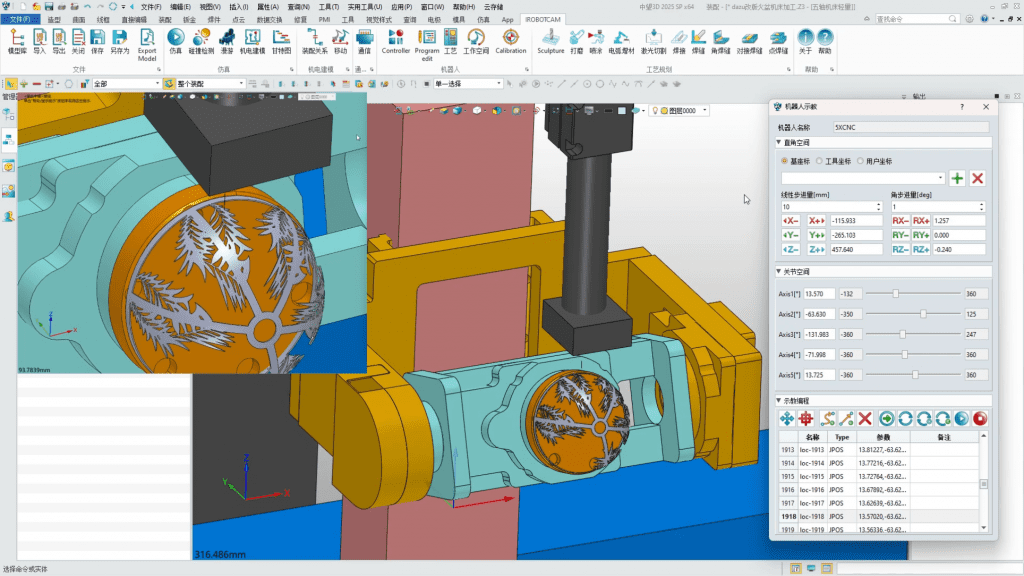
Przyjrzyjmy się, jak iRobotCAM wykorzystuje 5-osiowe obrabiarki do obróbki laserowej i symulacji:
- Zastosowanie technologii laserowej robota
Technologia laserowa robota jest głównie wysoce precyzyjna, a możliwość osiągnięcia wysoce precyzyjnej produkcji przy użyciu laserów stanowi podstawę dla różnych branż, takich jak przemysł lotniczy, samochodowy i maszynowy, w celu uzyskania sprzętu o wysokiej wydajności lub wysokiej precyzji. Jeśli chodzi o przemysł robotyczny, jakie są trudności w zastosowaniu technologii laserowej? Jak szybko zrealizować zastosowanie technologii laserowej robota?
Po pierwsze, w przypadku technologii obróbki laserowej robota ogólny proces wygląda następująco:
Import robota i przedmiotu obrabianego> Pozycjonowanie przedmiotu obrabianego i kalibracja robota> Realizacja programowania trajektorii> Symulacja całej sceny> Wyjście kodu i przetwarzanie robota
Z powyższego procesu można wywnioskować, że nacisk technologii laserowej położony jest na ustanowienie środowiska cyfrowego oraz wyjście i symulację kodu. Weźmy oprogramowanie do programowania offline iRobotCAM jako przykład, aby wyjaśnić, jak używać iRobotCAM w celu osiągnięcia wydajnego zastosowania technologii laserowej robota.
1) . Wykorzystując iRobotCAM, który opiera się na możliwościach platformy CAD 3D, można szybko modelować digitalizację sprzętu i procesów
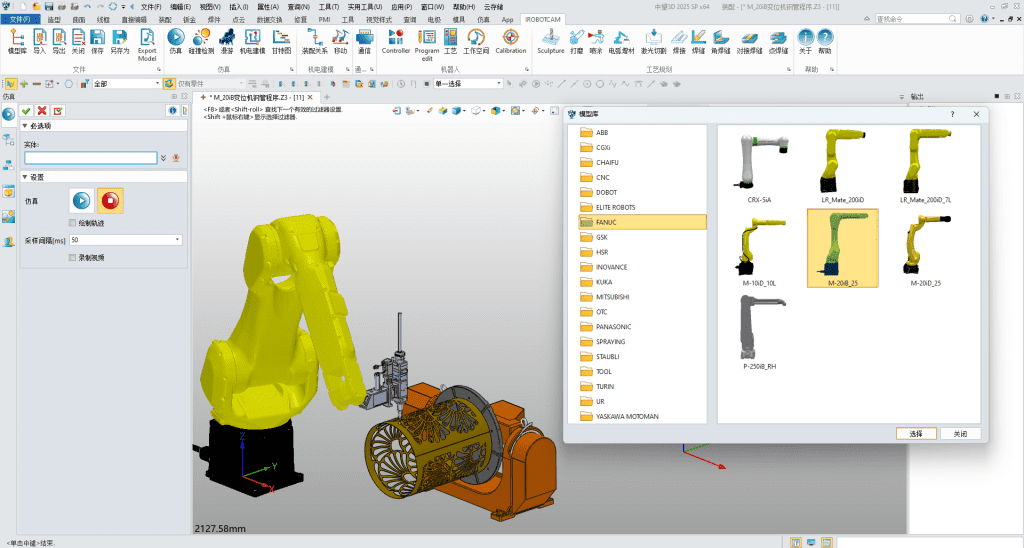
2) Korzystając z biblioteki maszyn iRobotCAM, możesz szybko budować roboty lub narzędzia związane z zastosowaniami laserowymi, unikając konieczności wielokrotnego budowania podstawowych bibliotek części w przyszłości i pomagając firmom efektywniej wykorzystywać modele cyfrowe.
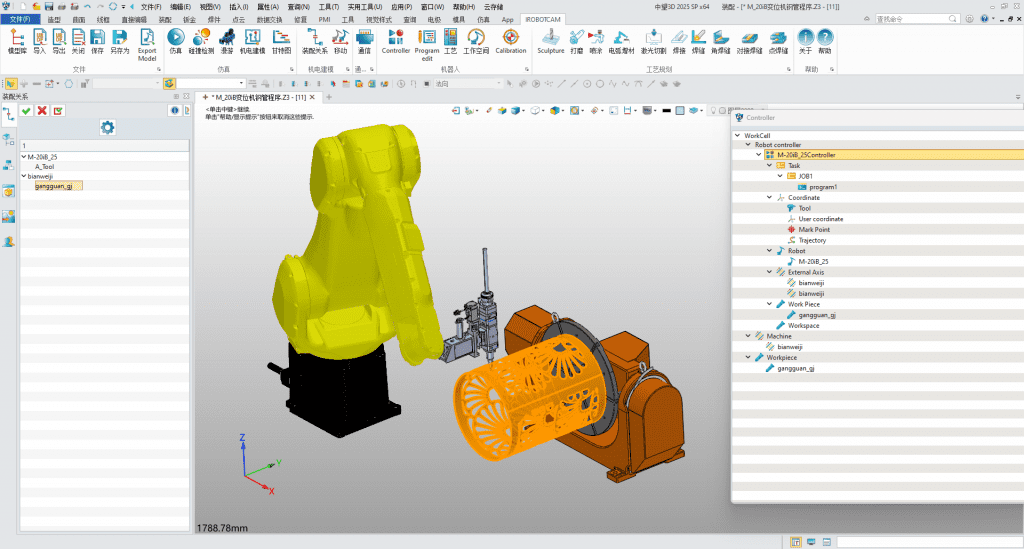
3). Wykorzystując unikalną funkcję pozycjonowania iRobotCAM, przedmiot obrabiany można szybko i dokładnie ustawić zgodnie z wymaganiami obróbki laserowej. Dokładniej rzecz biorąc, iRobotCAM może osiągnąć pozycjonowanie przedmiotu obrabianego w różnych warunkach roboczych w oparciu o funkcje CAD przedmiotu obrabianego.
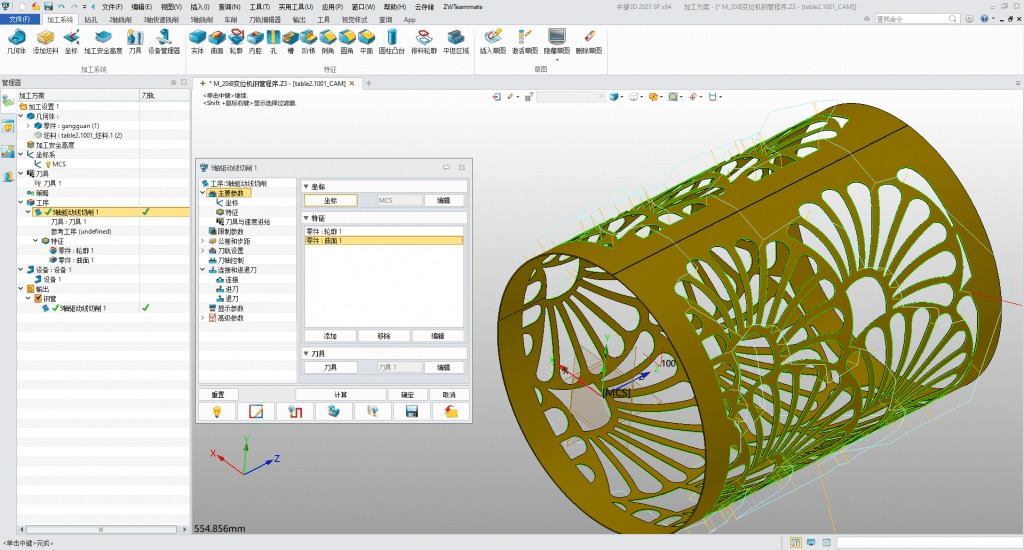
4) Wykorzystując możliwości generowania trajektorii w iRobotCAM, możliwe jest generowanie złożonych trajektorii wieloosiowych na zakrzywionych powierzchniach i realizacja zastosowań procesów laserowych dla robotów z więcej niż 7 osiami.
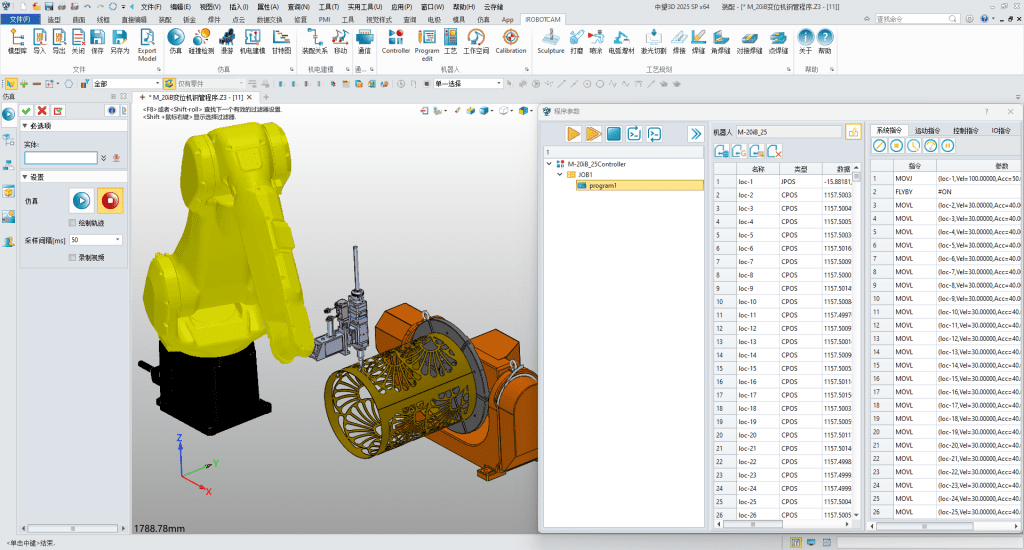
5). Możliwości wirtualnego debugowania robotów iRobotCAM można wykorzystać do programowania scen laserowych robotów i wirtualnej symulacji, a także do efektywnej kontroli wpływu technologii robotów na aplikację.
6). Wykorzystując możliwości przetwarzania końcowego iRobotCAM, można sprawnie dostosować się do różnych typów robotów, w tym FANUC, ABB, Yaskawa, KUKA, GSK, STEP, Estun, Turin itp. i sprawnie używać jednego zestawu oprogramowania do zarządzania wieloma markami lub wieloma urządzeniami.
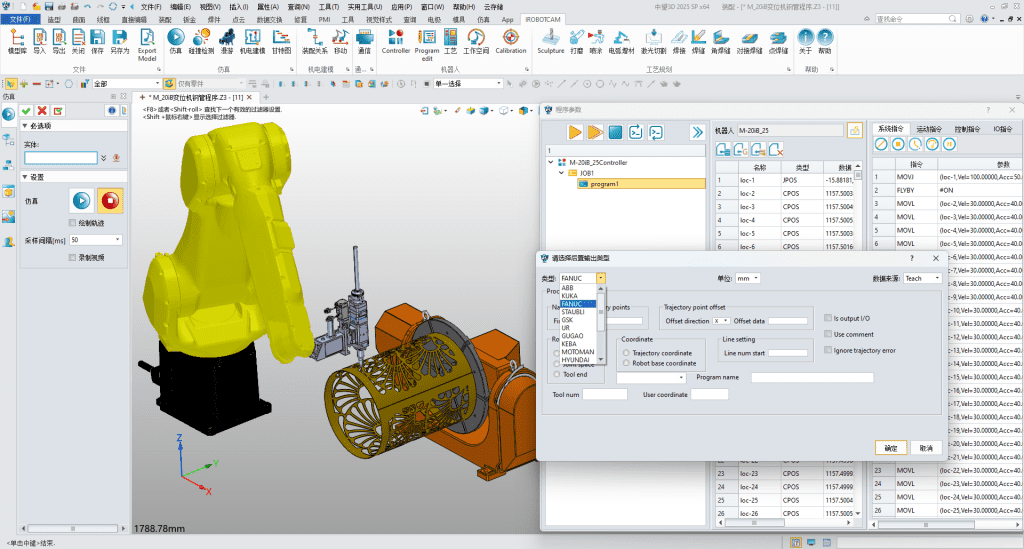
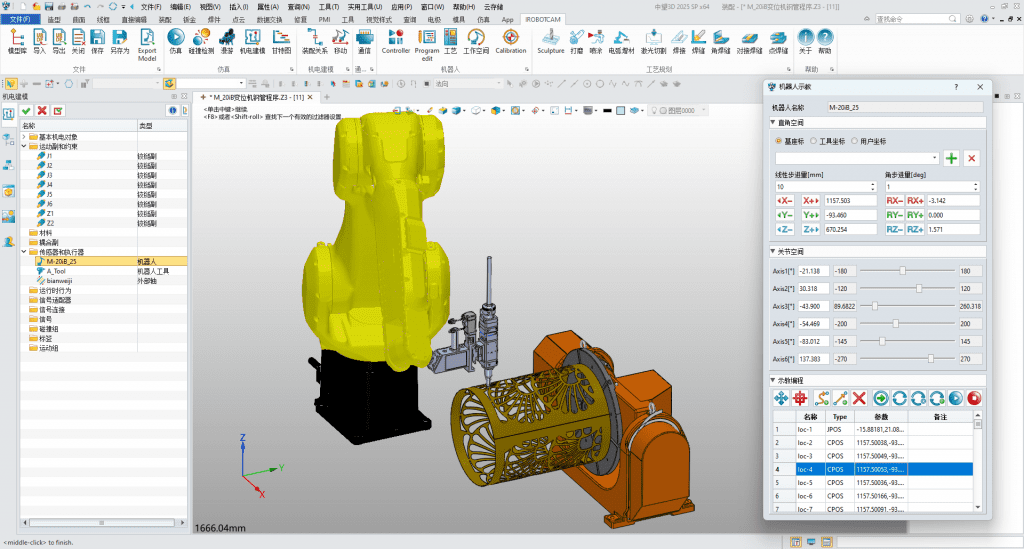
Następnie przyjrzyjmy się, w jaki sposób iRobotCAM wykorzystuje roboty do przetwarzania 5-osiowego wzoru pustego. Dzięki elastycznym możliwościom programowania iRobotCAM można uzyskać generowanie trajektorii 5-osiowej i szybką symulację robota.
- Podsumowanie
Podstawowym punktem zastosowania technologii laserowej jest precyzja, która wymaga programowania i symulacji, aby uzyskać projekt architektury o wysokiej precyzji. Poprzez powyższe typowe przypadki zastosowań 5-osiowej maszyny do obróbki laserowej i scenariusze zastosowań wieloosiowej obróbki laserowej robota można zauważyć, że wybór iRobotCAM jako rozwiązania do obróbki laserowej i wirtualnego debugowania może skutecznie rozwiązać podstawowy problem wysokiej precyzji obróbki laserowej. I dalsza ekspansja, jako zastosowanie procesu obróbki laserowej, iRobotCAM może dalej rozszerzać swoje zastosowanie w większej liczbie scenariuszy, w tym cięciu laserowym, napawaniu laserowym, zastosowaniach wytwarzania addytywnego łukiem elektrycznym itp. ze względu na otwartość swojej architektury technicznej i odzwierciedlać swoje oczywiste zalety techniczne o wysokiej precyzji.
O technologii Yueqing
Yueqing Technology stawia sobie za cel zbudowanie otwartej platformy do programowania robotów offline iRobotCAM. Platforma ta jest cyfrowym rozwiązaniem integrującym elektromechaniczny projekt koncepcyjny linii produkcyjnych, symulację programowania przetwarzania robotów oraz wirtualne debugowanie.
iRobotCAM website: www.iRobotCAM.com; Contact: cooperation@iRobotCAM.com


