Resumo: A Yueqing Technology lançou um white paper sobre a tecnologia de simulação e programação de processamento a laser, que descreve as dificuldades do controlo de alta precisão da aplicação da tecnologia de processamento a laser e discute ainda a trajetória e o esquema de simulação do processamento a laser, como utilizar eficazmente o iRobotCAM para completar o processamento e a simulação a laser e melhorar significativamente o desenvolvimento de equipamentos de cenários de aplicação de processos a laser e a eficiência da aplicação do processo a laser.
- Visão geral da indústria do laser
A indústria do laser tem uma enorme escala de empregos e tamanho de mercado futuro, além de estar num período de rápido desenvolvimento.
- Características da tecnologia laser
A maior característica do processo laser é a elevada precisão. Para melhor compreender a aplicação da tecnologia laser, partimos do cenário de equipamentos de aplicação da tecnologia laser e tomámos o desenvolvimento e a aplicação de máquinas-ferramentas laser e aplicações de processamento de robôs laser como aplicações típicas para melhor analisar as suas dificuldades e explicar melhor as soluções.
- Desenvolvimento e aplicação de máquinas-ferramentas laser
A partir do processo de desenvolvimento de equipamentos de máquinas-ferramenta laser, podemos compreender melhor as dificuldades de aplicação e soluções da tecnologia laser em máquinas-ferramenta.
Processo de desenvolvimento de máquinas-ferramentas laser: modelação de estruturas 3D < modelação eletromecânica e simulação de movimento < geração de trajetórias e depuração virtual < simulação de pós-processamento e processamento
O seguinte utiliza o iRobotCAM como solução de software para o desenvolvimento e depuração de máquinas-ferramentas laser para explicar como implementar o desenvolvimento de máquinas-ferramentas laser e a depuração virtual passo a passo, e realizar a produção em massa e a aplicação de máquinas-ferramentas laser.
1) Modelação de estruturas 3D: o iRobotCAM utiliza as características da plataforma CAD 3D para construir rapidamente um modelo digital da estrutura 3D da máquina-ferramenta.
2) Modelação eletromecânica e simulação de movimento: o iRobotCAM possui um módulo de modelação eletromecânica que pode ser utilizado para a modelação e projeto de linhas de produção e depuração virtual de robôs. Antes da produção real, o processo de processamento do laser pode ser simulado num ambiente virtual para descobrir e resolver antecipadamente possíveis problemas, tais como interferência de colisão de movimento do robô, verificação de singularidade, alcance e colisão do robô, erros de trajetória do laser, etc., para reduzir os erros e riscos na depuração real e melhorar a eficiência e a segurança da produção.
3) Geração de trajetória e depuração virtual: desenvolvido com base na plataforma ZW3D, pode utilizar vários algoritmos de trajetória de 2 a 5 eixos do ZW3D, para que o robô tenha algoritmos de trajetória precisos semelhantes ao software CAM durante o processo de processamento a laser e possa focar com precisão o feixe de laser na parte de processamento, realizando cortes a laser de alta precisão, soldadura, gravação e outros processos, garantindo qualidade e consistência do processamento.
4). Pós-processamento e simulação de maquinação: o prático módulo de pós-processamento do iRobotCAM pode gerar código rapidamente e exibir intuitivamente os efeitos de simulação de maquinação
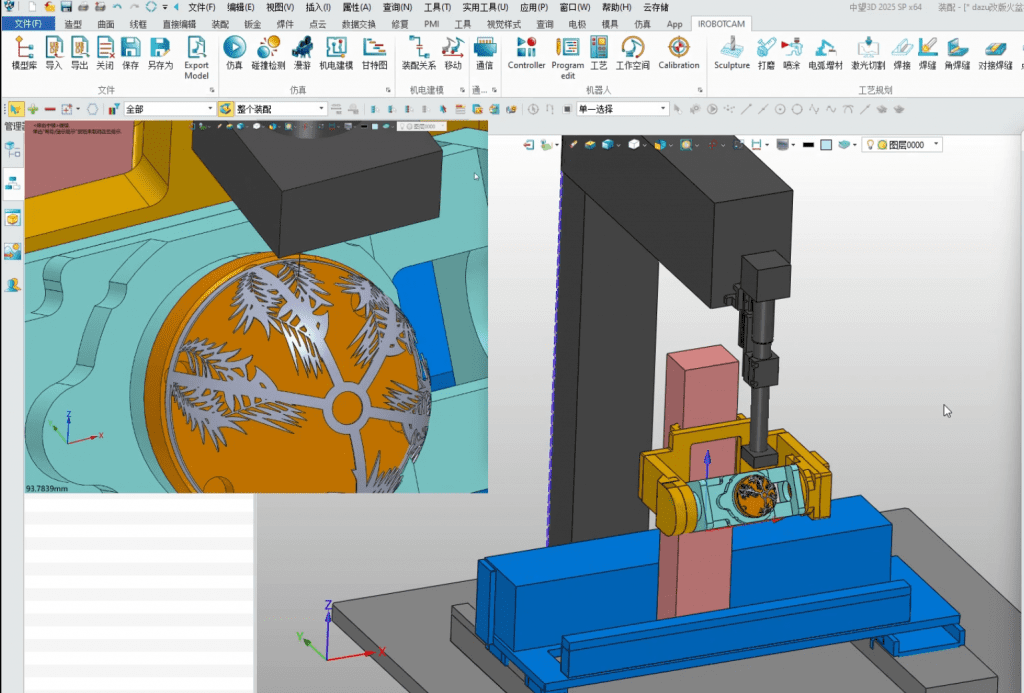
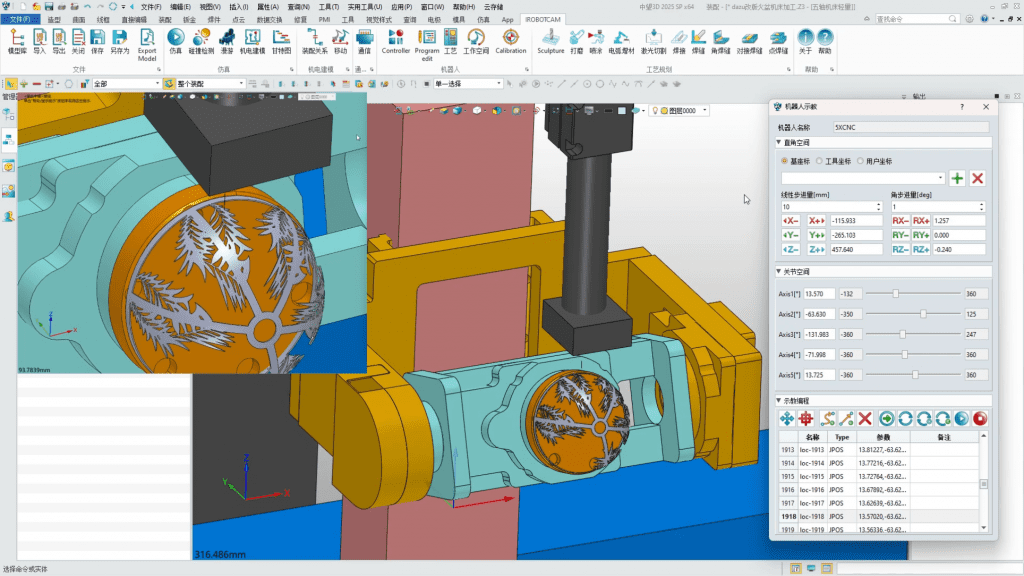
Vamos dar uma vista de olhos à forma como o iRobotCAM utiliza máquinas-ferramentas de 5 eixos para obter processamento e simulação a laser:
4. Aplicação da tecnologia de laser robótico
A tecnologia de laser robótico é principalmente de alta precisão, e a capacidade de alcançar uma fabricação de alta precisão utilizando lasers é a base para vários setores, como o aeroespacial, automóvel e de máquinas, para alcançar equipamentos de alto desempenho ou alta precisão. Quanto à indústria robótica, quais as dificuldades na aplicação da tecnologia laser? Como concretizar rapidamente a aplicação da tecnologia de laser robótico?
Em primeiro lugar, para a tecnologia de processamento de laser robotizado, o processo global é o seguinte:
Importação do robô e da peça de trabalho > Posicionamento da peça de trabalho e calibração do robô > Realização da programação da trajetória > Simulação de toda a cena > Saída de código e processamento do robô
Do processo acima, pode-se observar que o foco da tecnologia laser está no estabelecimento de um ambiente digital e na saída e simulação de código. Vamos utilizar o software de programação offline iRobotCAM como exemplo para explicar como utilizar o iRobotCAM para obter uma aplicação eficiente da tecnologia de laser robótico.
1) . Utilizando o iRobotCAM, que se baseia na capacidade da plataforma CAD 3D, a digitalização de equipamentos e processos pode ser rapidamente modelada
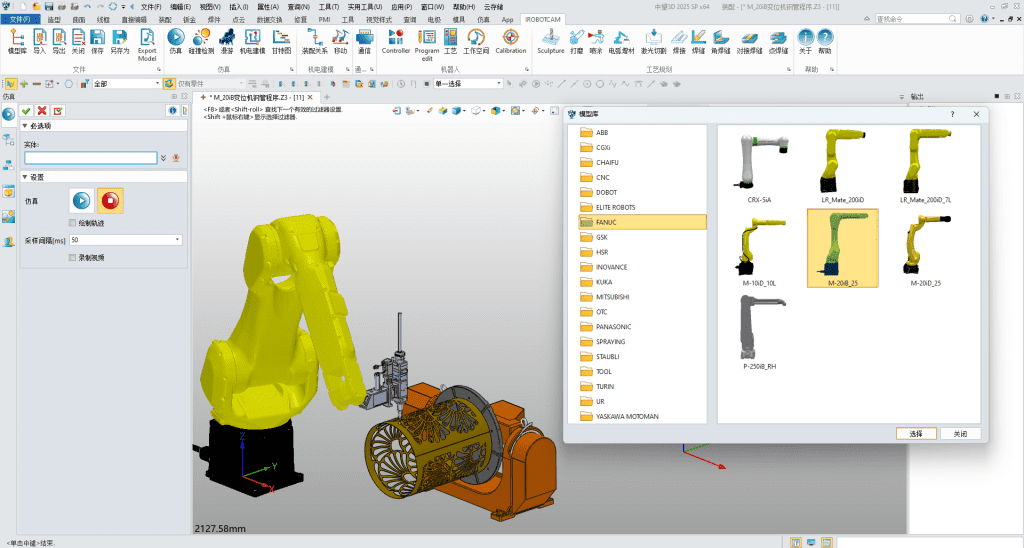
2) . Utilizando a biblioteca de máquinas do iRobotCAM, pode construir rapidamente robôs ou ferramentas relacionadas com aplicações laser, evitando a necessidade de construir repetidamente bibliotecas de peças básicas no futuro e ajudando as empresas a utilizar modelos digitais de forma mais eficiente.
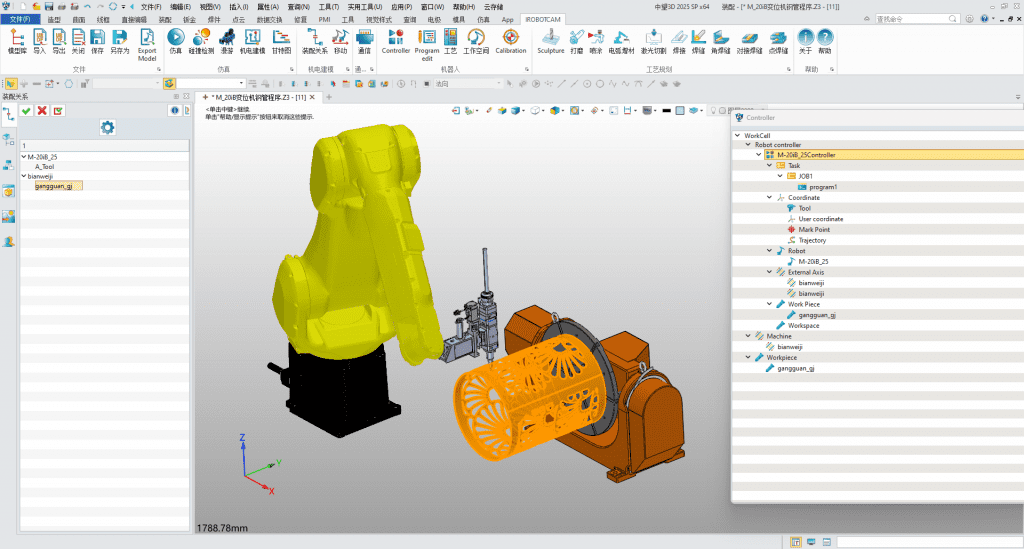
3). Ao utilizar a função de posicionamento exclusiva do iRobotCAM, a peça de trabalho pode ser posicionada de forma rápida e precisa, de acordo com os requisitos de processamento a laser. Mais especificamente, o iRobotCAM pode obter o posicionamento da peça sob várias condições de trabalho com base nas capacidades CAD da peça.
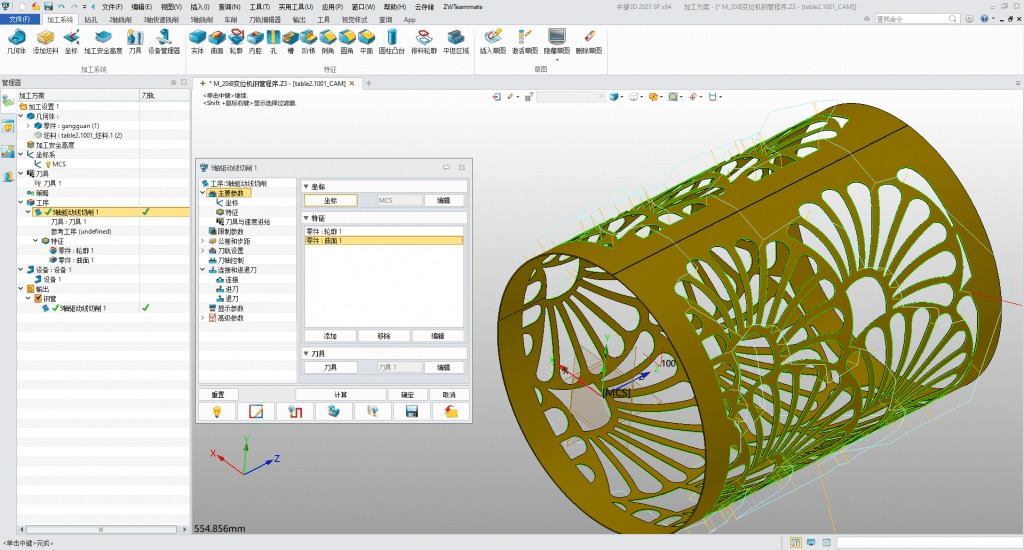
4) . Ao utilizar a capacidade de geração de trajetórias do iRobotCAM, é possível gerar trajetórias multieixos complexas em superfícies curvas e realizar a aplicação de processos laser para robôs com mais de 7 eixos.
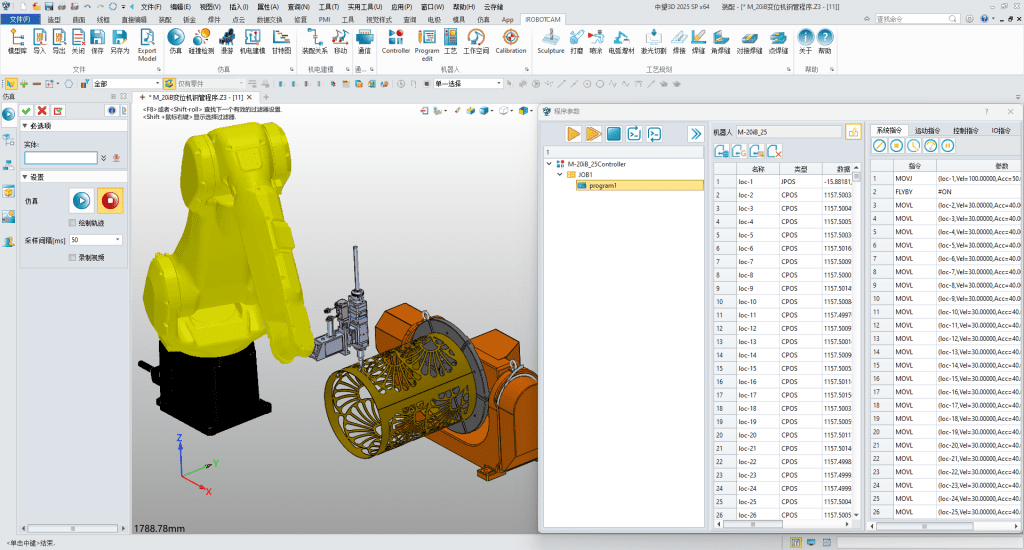
5). As capacidades de depuração virtual de robôs do iRobotCAM podem ser utilizadas para realizar a programação de cenas laser de robôs e simulação virtual, bem como visualizar eficientemente o efeito da aplicação da tecnologia de robôs.
6.Ao utilizar as capacidades de pós-processamento do iRobotCAM, pode adaptar-se eficientemente a vários tipos de robôs, incluindo FANUC, ABB, Yaskawa, KUKA, GSK, STEP, Estun, Turin, etc., e utilizar eficientemente um conjunto de software para gerir várias marcas ou vários dispositivos.
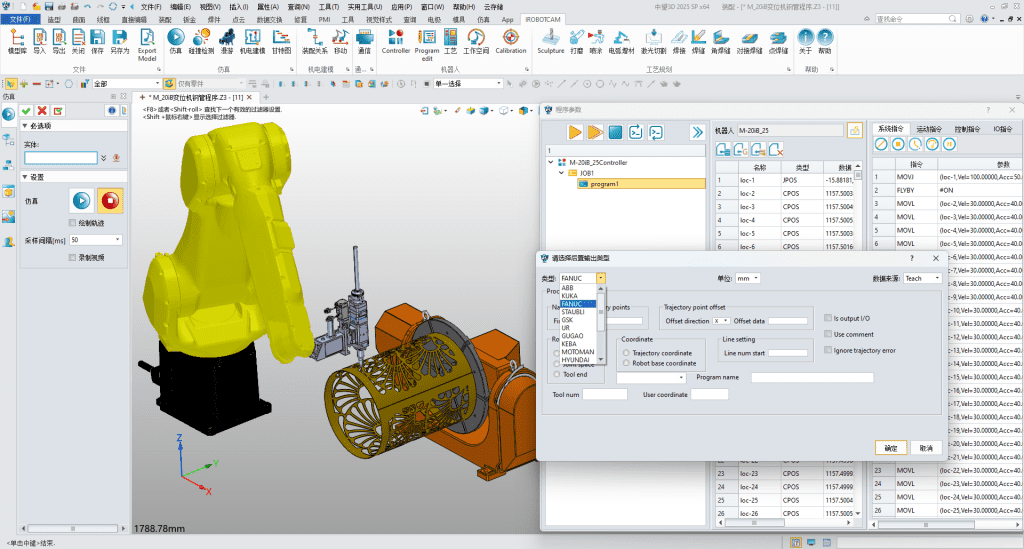
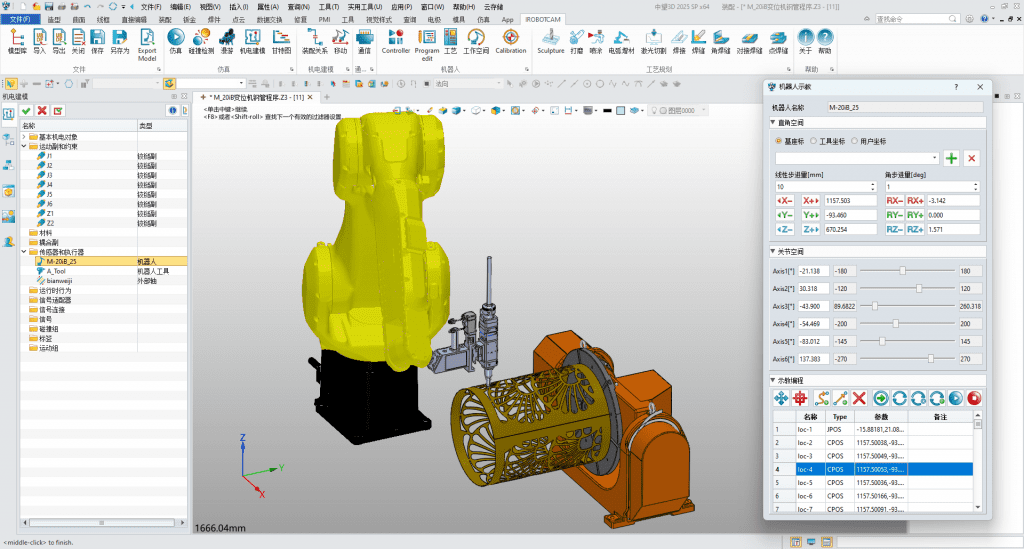
A seguir, vamos dar uma vista de olhos a como o iRobotCAM utiliza robôs para obter o processamento de padrões ocos de 5 eixos. Através das capacidades de programação flexíveis do iRobotCAM, é possível obter uma geração de trajetórias de 5 eixos e uma simulação rápida de robôs.
5. Resumo
O ponto central da aplicação da tecnologia laser é a precisão, que requer programação e simulação para ter um design de arquitetura de alta precisão. Através dos casos de aplicação típicos de máquinas de processamento a laser de 5 eixos e cenários de aplicação de processamento a laser multieixos por robôs acima, pode-se observar que a escolha do iRobotCAM como solução para o processamento a laser e a depuração virtual pode resolver eficazmente o problema subjacente de alta precisão do processamento a laser. E expandindo ainda mais, como uma aplicação de processo de processamento a laser, o iRobotCAM pode expandir ainda mais a sua aplicação em mais cenários, incluindo corte a laser, revestimento a laser, aplicações de fabrico aditivo a arco, etc. devido à abertura da sua arquitetura técnica e refletir as suas evidentes vantagens técnicas de elevada precisão.
Sobre a Yueqing Technology
A Yueqing Technology está empenhada em construir uma plataforma aberta de programação offline de robôs iRobotCAM, que é uma solução digital que integra o design conceptual eletromecânico de linhas de produção, a simulação de programação de processamento de robôs e a depuração virtual.
Site da iRobotCAM: www.iRobotCAM.com; Contacto: cooperation@iRobotCAM.com


