Resumen: Frente al problema del alto umbral y el alto costo de la plataforma de modelado y entrenamiento de robots, Yueqing Technology aprovecha sus propias ventajas tecnológicas de la industria en software de robots para lanzar el módulo de modelado de robots basado en el núcleo de geometría 3D, expandir la interfaz URDF y abrir la simulación y el análisis de robots ROS.
Frente al problema del alto umbral y el alto costo de la plataforma de modelado y entrenamiento de robots, Yueqing Technology aprovechó sus ventajas técnicas industriales en software de robots para lanzar el módulo de modelado de robots iRobotCAM basado en la plataforma de núcleo de geometría 3D.
- Con las capacidades de modelado de iRobotCAM y las capacidades del motor de física desarrollado internamente, iRobotCAM puede crear y administrar rápidamente modelos de robots y realizar simulaciones físicas.
- Con las interfaces de importación y exportación URDF extendidas, iRobotCAM se conecta aún más con los robots ROS, lo que permite a los usuarios conectar el modelado y la simulación de robots para entrenar el modelo físico de los robots de manera más efectiva.
A continuación se toma el robot industrial más simple como ejemplo para explicar con más detalle cómo utilizar iRobotCAM para realizar el modelado y entrenamiento del robot:
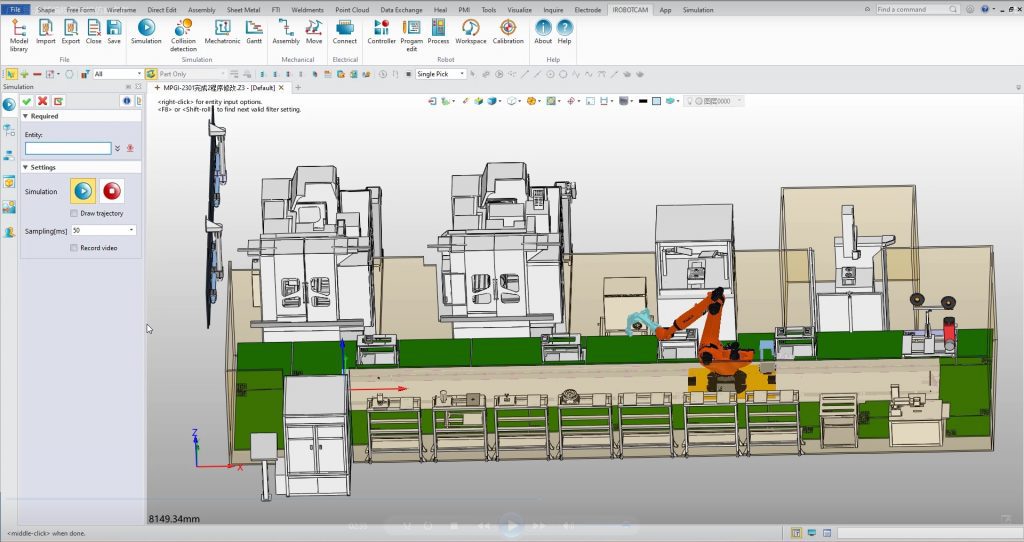
- Modelado digital de escenas 3D
- Utilizando la función de modelado 3D, iRobotCAM puede construir modelos 3D complejos y completar el modelado de escenas digitales.
- Admite la importación de iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid y otros formatos 3D, con el fin de reutilizar los modelos 3D existentes y mejorar la eficiencia de la construcción de escenas digitales de robots.
- Biblioteca de Diseño Mecatrónico y Robótica
- Establecimiento de un entorno de datos de sensores: admite sistemas de señales PLC, incluidos Siemens, Mitsubishi, Inovance y otras marcas, y admite la personalización de más dispositivos de acceso a señales.
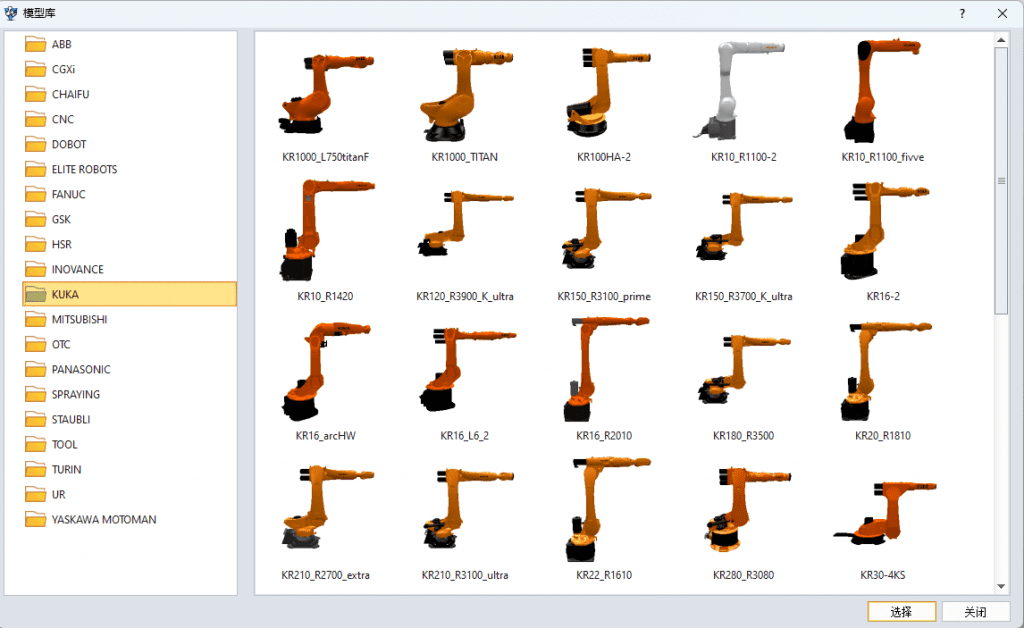
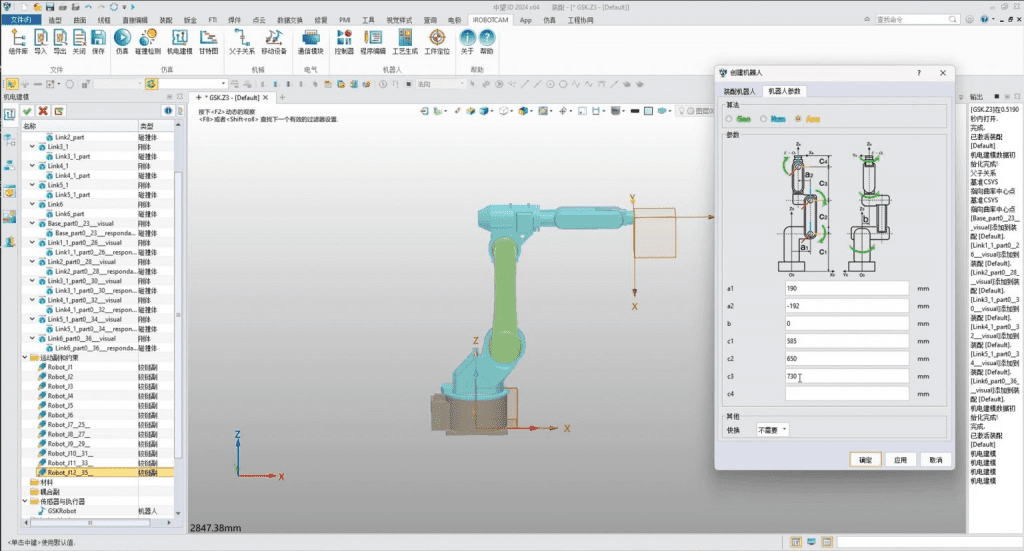
- Creación de una biblioteca de robots: Para robots industriales, puede utilizar las bibliotecas integradas de ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO y Turing para crear modelos de simulación, o crear su propia biblioteca de robots mediante funciones de personalización. Para robots humanoides o con ruedas, puede obtener la información detallada de las articulaciones de las partes correspondientes según sea necesario, y puede generar la definición general de las articulaciones, la detección de colisiones, etc., para formar una biblioteca completa de robots humanoides o con ruedas.
- Entrenamiento de robots
- Establecimiento de un modelo de planificación de trayectoria de robot: admite la simulación de comunicación IO de múltiples máquinas, la sincronización de múltiples robots y la planificación de vínculos de múltiples ejes de robots;
- Entrenamiento de modelos físicos entrenados por robots: Admite la simulación de características físicas mediante el uso de su propio motor de física, incluidos los requisitos de evitación de obstáculos, análisis de colisiones y otros modelos de datos, y admite la expansión de interfaces de terceros para soportar los algoritmos de entrenamiento de robots en escenarios específicos.
- Acoplamiento de datos con robots ROS para lograr una depuración conjunta
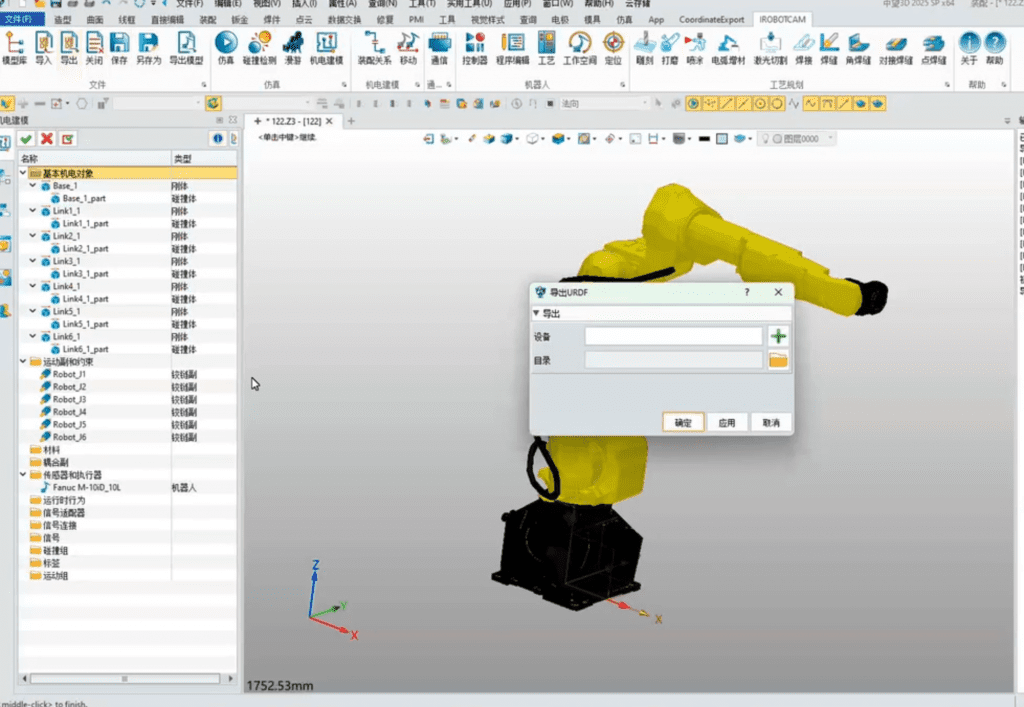
- El modelo de optimización del robot completado por iRobotCAM se puede exportar a URDF para una mayor simulación y ejecución de robots ROS.
- Con la función de importación de URDF, el modelo base del robot se puede importar a iRobotCAM, y el entorno de datos del robot se puede modificar y entrenar aún más en iRobotCAM para cumplir con los objetivos de diseño del modelo de datos del robot.
Acerca de Yueqing Technology
Yueqing Technology se ha comprometido a construir una plataforma abierta de programación fuera de línea de robots iRobotCAM, que es una solución digital que integra el diseño conceptual electromecánico de líneas de producción, la simulación de programación de procesamiento de robots y la depuración virtual.
Sitio web de iRobotCAM: www.iRobotCAM.com; Contacto: Cooperation@iRobotCAM.com


