Özet: Robot modelleme ve eğitim platformunun yüksek eşik değeri ve yüksek maliyeti sorunuyla karşı karşıya kalan Yueqing Technology, robot yazılımındaki kendi endüstri teknolojisi avantajlarından yararlanarak 3B geometri çekirdeğine dayalı robot modelleme modülünü piyasaya sürüyor, URDF arayüzünü genişletiyor ve ROS robotlarının simülasyonunu ve analizini açıyor.
Robot modelleme ve eğitim platformunun yüksek eşik değeri ve yüksek maliyeti sorunuyla karşı karşıya kalan Yueqing Technology, robot yazılımındaki endüstri teknik avantajlarından yararlanarak 3 boyutlu geometri çekirdek platformuna dayalı iRobotCAM robot modelleme modülünü piyasaya sürdü.
- iRobotCAM’in modelleme kabiliyetleri ve kendi geliştirdiği fizik motorunun kabiliyetleri sayesinde iRobotCAM, robot modellerini hızlı bir şekilde oluşturup yönetebiliyor ve fiziksel simülasyonlar gerçekleştirebiliyor.
- Genişletilmiş URDF içe ve dışa aktarma arayüzleri sayesinde iRobotCAM, ROS robotlarıyla daha fazla bağlantı kurarak, kullanıcıların robot modellemesini ve robot simülasyonunu birbirine bağlayarak robotların fiziksel modelini daha etkili bir şekilde eğitmelerine olanak tanır.
Aşağıda, iRobotCAM’in robot modelleme ve eğitim modelini gerçekleştirmek için nasıl kullanılacağını daha ayrıntılı olarak açıklamak amacıyla en basit endüstriyel robot örneği ele alınmıştır:
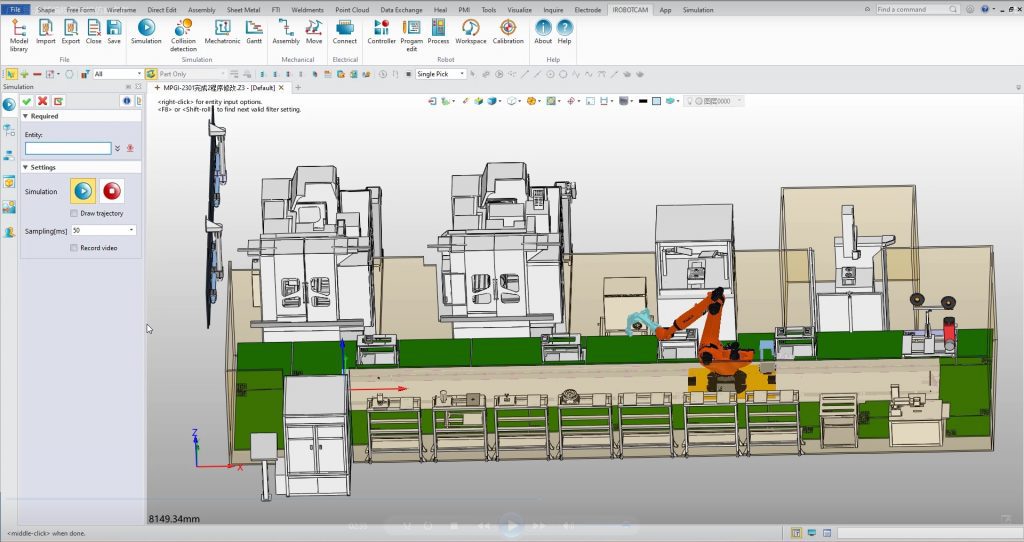
- Dijital 3D sahne modelleme
- iRobotCAM, 3D modelleme fonksiyonunu kullanarak karmaşık 3D modeller oluşturabilir ve dijital sahnelerin modellemesini tamamlayabilir.
- Mevcut 3D modelleri yeniden kullanmak ve robot dijital sahne oluşturma verimliliğini artırmak için iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid ve diğer 3D formatlarının içe aktarılmasını destekleyin.
- Mekatronik Tasarım ve Robotik Kütüphanesi
- Sensör veri ortamının kurulması: Siemens, Mitsubishi, Inovance ve diğer markalar dahil olmak üzere PLC sinyal sistemlerini destekler ve daha fazla sinyal erişim cihazının özelleştirilmesini destekler
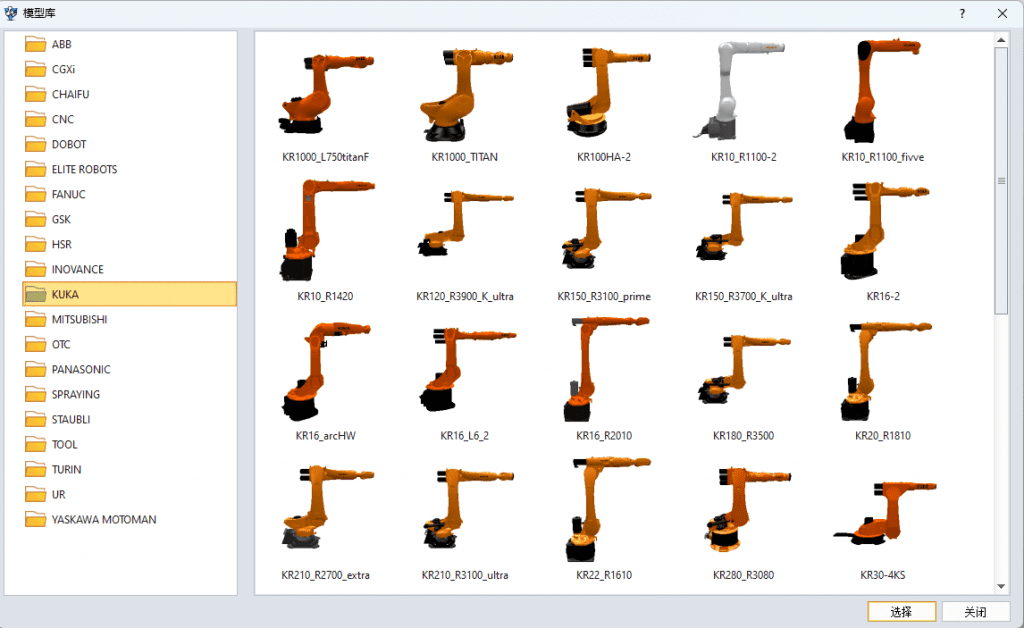
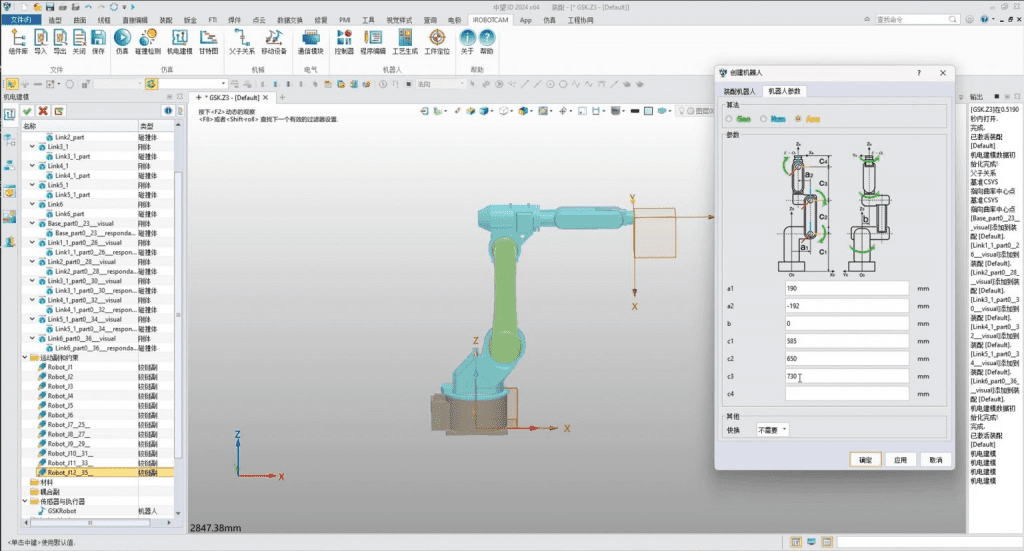
- Robot kütüphanesinin kurulması: Endüstriyel robotlar için, robot simülasyon modelleri kurmak için ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO ve Turing dahil gömülü robot kütüphanelerini kullanabilir veya robot özelleştirme işlevleri aracılığıyla kendi robot kütüphanenizi kurabilirsiniz. İnsansı veya tekerlekli robotlar için, ilgili parçaların ayrıntılı eklem bilgileri gerektiği gibi kurulabilir ve genel eklem tanımı, çarpışma tespiti vb., eksiksiz bir insansı veya tekerlekli özel robot kütüphanesi oluşturmak için oluşturulabilir.
- Robot eğitimi
- Robot yörünge planlama modelinin kurulması: çoklu makine IO iletişim simülasyonunu, çoklu robot senkronizasyonunu ve robot çok eksenli bağlantı planlamasını destekler;
- Robotlar Tarafından Eğitilen Fiziksel Modellerin Eğitimi: Engellerden kaçınma gereksinimleri, çarpışma analizi ve diğer veri modelleri de dahil olmak üzere kendi fizik motorunu kullanarak fiziksel özelliklerin simülasyonunu destekler ve belirli senaryolarda robotların eğitim algoritmalarını desteklemek için üçüncü taraf arayüzlerinin genişletilmesini destekler.
- Ortak hata ayıklamayı sağlamak için ROS robotlarıyla veri yerleştirme
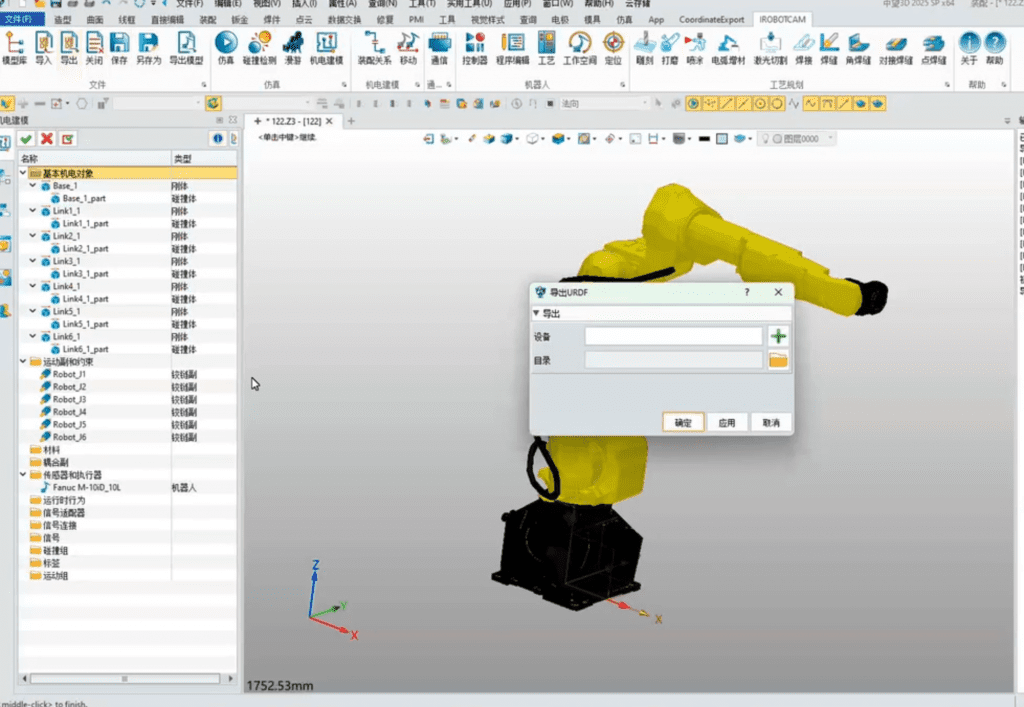
- iRobotCAM tarafından tamamlanan robot optimizasyon modeli, ROS robotlarının daha ileri simülasyonu ve yürütülmesi için URDF’ye aktarılabilir
- URDF’nin içe aktarma fonksiyonu ile robot temel modeli iRobotCAM’e aktarılabilir ve robot veri ortamı, robotun veri modelinin tasarım hedeflerine uyacak şekilde iRobotCAM üzerinde daha fazla değiştirilebilir ve eğitilebilir.
Yueqing Teknolojisi Hakkında
Yueqing Technology, üretim hatlarının elektromekanik kavramsal tasarımını, robot işleme programlama simülasyonunu ve sanal hata ayıklamayı birleştiren dijital bir çözüm olan açık bir iRobotCAM robot çevrimdışı programlama platformu oluşturmaya kendini adamıştır.
iRobotCAM web sitesi: www.iRobotCAM.com; İletişim: collaboration@iRobotCAM.com


