초록: 로봇 모델링 및 훈련 플랫폼의 높은 임계값과 높은 비용이라는 문제에 직면하여, Yueqing Technology는 로봇 소프트웨어 분야에서 자체 산업 기술 우위를 활용하여 3D 기하 커널을 기반으로 한 로봇 모델링 모듈을 출시하고, URDF 인터페이스를 확장하며, ROS 로봇의 시뮬레이션 및 분석을 개방했습니다.
로봇 모델링 및 교육 플랫폼의 높은 임계값과 높은 비용이라는 문제에 직면하여, Yueqing Technology는 로봇 소프트웨어 분야의 기술적 우위를 활용하여 3D 기하 커널 플랫폼을 기반으로 한 iRobotCAM 로봇 모델링 모듈을 출시했습니다.
- iRobotCAM의 모델링 기능과 자체 개발한 물리 엔진의 기능을 통해 iRobotCAM은 로봇 모델을 신속하게 생성하고 관리하며 물리적 시뮬레이션을 수행할 수 있습니다.
- 확장된 URDF 가져오기 및 내보내기 인터페이스를 통해 iRobotCAM은 ROS 로봇과 더욱 긴밀하게 연결되어 사용자가 로봇 모델링과 로봇 시뮬레이션을 연결하여 로봇의 물리적 모델을 보다 효과적으로 훈련할 수 있습니다.
다음에서는 가장 간단한 산업용 로봇을 예로 들어 iRobotCAM을 사용하여 로봇 모델링과 모델 훈련 방법을 자세히 설명합니다.
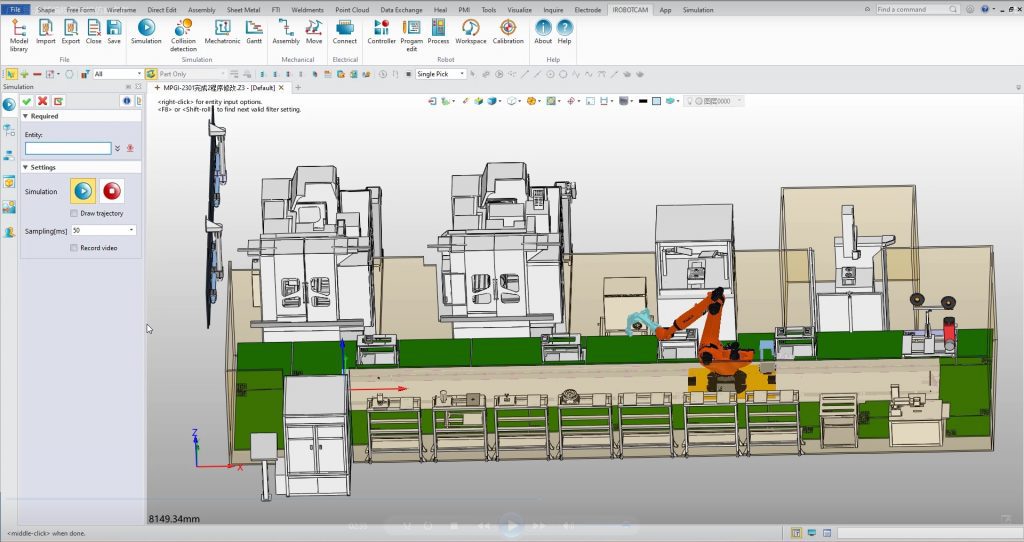
- 디지털 3D 장면 모델링
- iRobotCAM은 3D 모델링 기능을 사용하여 복잡한 3D 모델을 구축하고 디지털 장면의 모델링을 완료할 수 있습니다.
- 기존 3D 모델을 재사용하고 로봇 디지털 장면 구축의 효율성을 개선하기 위해 iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid 및 기타 3D 형식의 가져오기를 지원합니다.
- 메카트로닉스 설계 및 로봇공학 도서관
- 센서 데이터 환경 구축: Siemens, Mitsubishi, Inovance 및 기타 브랜드를 포함한 PLC 신호 시스템 지원 및 더 많은 신호 액세스 장치의 사용자 정의 지원
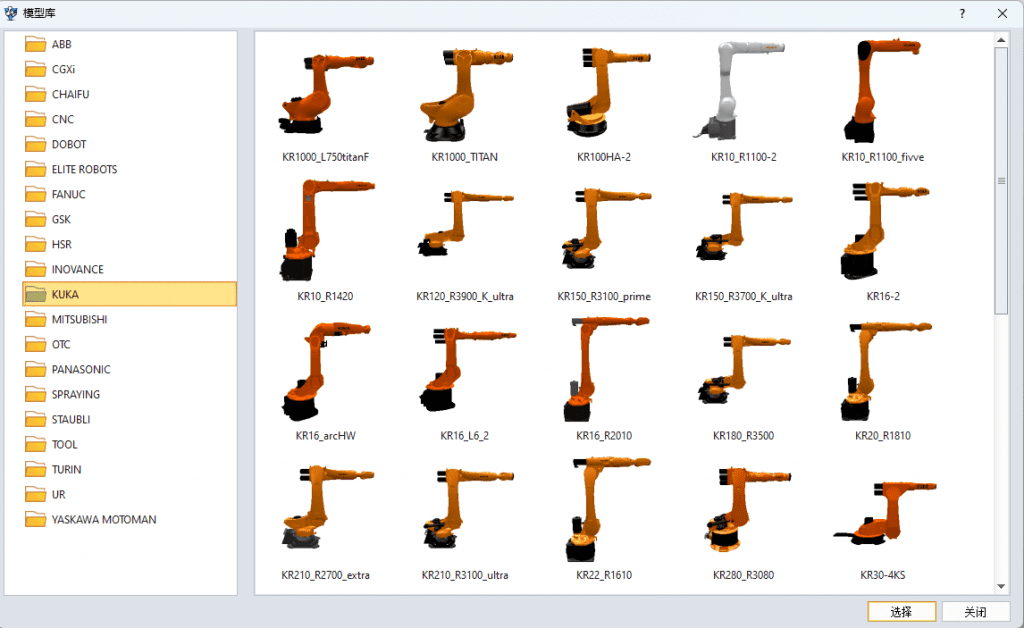
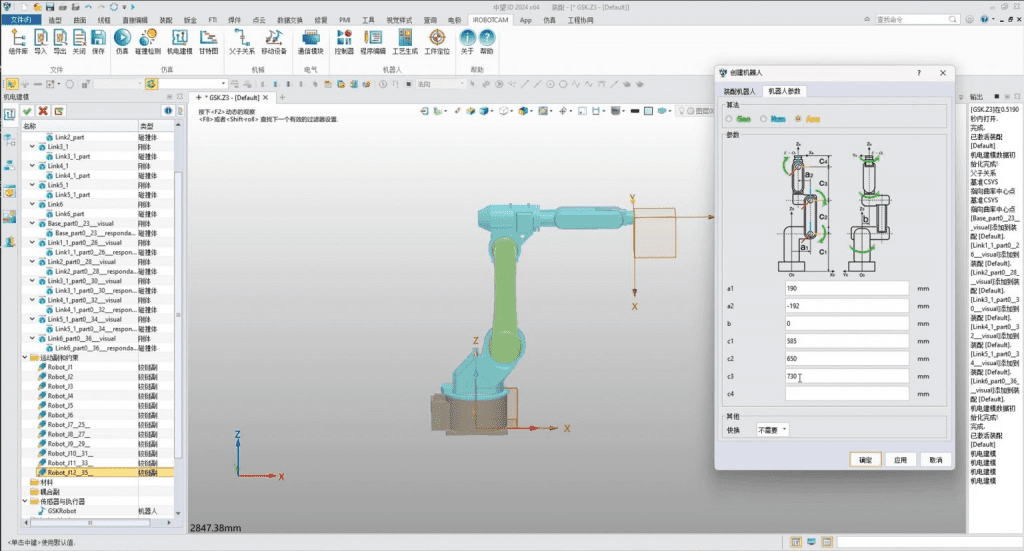
- 로봇 라이브러리 구축: 산업용 로봇의 경우, ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO, Turing 등의 내장 로봇 라이브러리를 사용하여 로봇 시뮬레이션 모델을 구축하거나, 로봇 맞춤 설정 기능을 통해 자체 로봇 라이브러리를 구축할 수 있습니다. 휴머노이드 또는 휠 로봇의 경우, 필요에 따라 해당 부품의 세부적인 관절 정보를 설정하고, 전반적인 관절 정의, 충돌 감지 등을 통해 완벽한 휴머노이드 또는 휠 로봇 전용 라이브러리를 구축할 수 있습니다.
- 로봇 훈련
- 로봇 궤적 계획 모델 구축: 다중 머신 IO 통신 시뮬레이션, 다중 로봇 동기화, 로봇 다축 연결 계획 지원
- 로봇이 학습한 물리적 모델의 학습: 장애물 회피 요구 사항, 충돌 분석 및 기타 데이터 모델을 포함하여 자체 물리 엔진을 사용하여 물리적 특성의 시뮬레이션을 지원하고, 특정 시나리오에서 로봇의 학습 알고리즘을 지원하기 위해 타사 인터페이스의 확장을 지원합니다.
- 공동 디버깅을 달성하기 위한 ROS 로봇과의 데이터 도킹
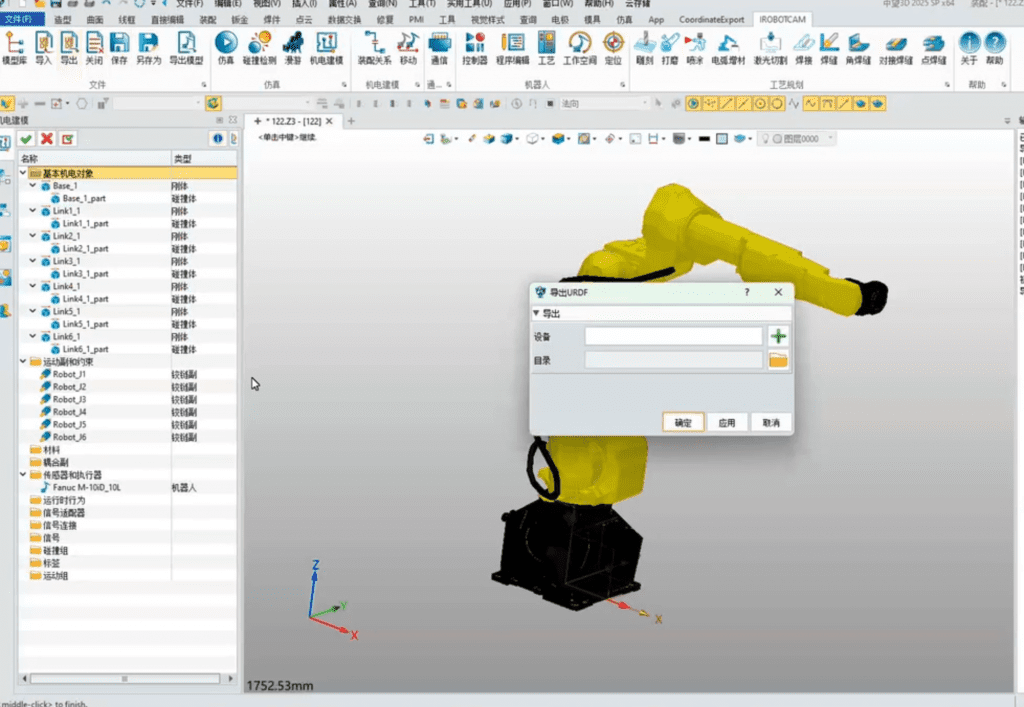
- iRobotCAM이 완성한 로봇 최적화 모델은 ROS 로봇의 추가 시뮬레이션 및 실행을 위해 URDF로 내보낼 수 있습니다.
- URDF의 가져오기 기능을 사용하면 로봇 기본 모델을 iRobotCAM으로 가져올 수 있으며, 로봇 데이터 환경을 추가로 수정하고 iRobotCAM에서 학습시켜 로봇 데이터 모델의 설계 목표를 충족할 수 있습니다.
Yueqing Technology 소개
웨칭 테크놀로지는 생산 라인의 전기기계 개념 설계, 로봇 가공 프로그래밍 시뮬레이션, 가상 디버깅을 통합한 디지털 솔루션인 개방형 iRobotCAM 로봇 오프라인 프로그래밍 플랫폼을 구축하는 데 전념하고 있습니다.
iRobotCAM 웹사이트: www.iRobotCAM.com; 문의: cooperation@iRobotCAM.com


