概要: ロボットモデリングとトレーニングプラットフォームの敷居が高く、コストも高いという問題に直面して、Yueqing Technology はロボットソフトウェアにおける自社の業界技術の優位性を活用して、3D ジオメトリカーネルに基づくロボットモデリングモジュールをリリースし、URDF インターフェイスを拡張し、ROS ロボットのシミュレーションと分析を可能にしました。
Yueqing Technology は、ロボット モデリングおよびトレーニング プラットフォームの敷居が高く、コストも高いという問題に直面し、ロボット ソフトウェアにおける業界の技術的優位性を活かして、3D ジオメトリ カーネル プラットフォームに基づく iRobotCAM ロボット モデリング モジュールをリリースしました。
- iRobotCAM のモデリング機能と独自開発の物理エンジンの機能により、iRobotCAM はロボット モデルを迅速に作成および管理し、物理シミュレーションを実行できます。
- 拡張された URDF インポートおよびエクスポート インターフェイスにより、iRobotCAM は ROS ロボットとさらに接続し、ユーザーはロボット モデリングとロボット シミュレーションを接続して、ロボットの物理モデルをより効果的にトレーニングできるようになります。
以下では、最も単純な産業用ロボットを例に、iRobotCAM を使用してロボットのモデリングとトレーニング モデルを実現する方法についてさらに詳しく説明します。
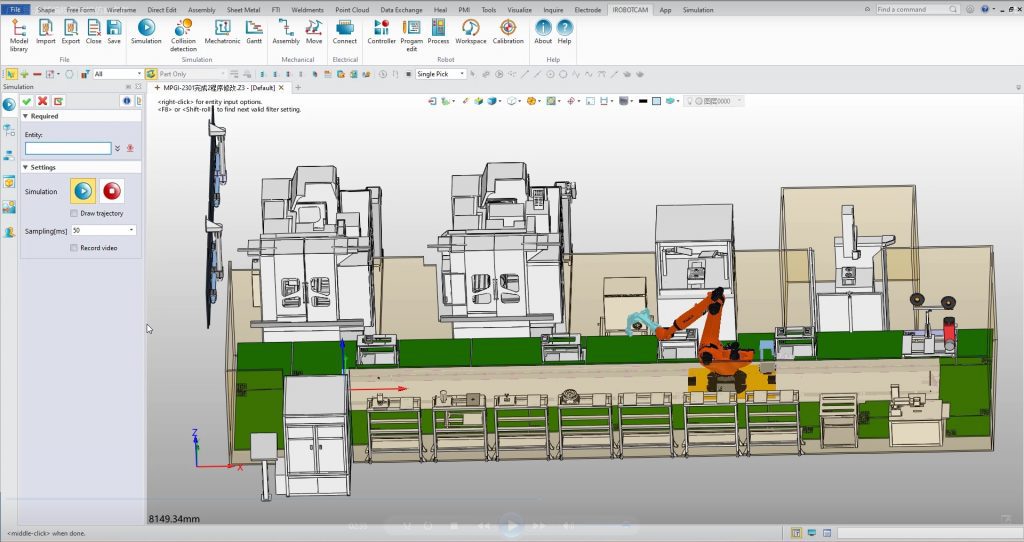
- デジタル3Dシーンモデリング
- iRobotCAM は 3D モデリング機能を使用して複雑な 3D モデルを構築し、デジタル シーンのモデリングを完了できます。
- iges、STEP、Solidworks、Creo、NX、Catia、Inventor、Parasolid などの 3D 形式のインポートをサポートし、既存の 3D モデルを再利用して、ロボットのデジタル シーン構築の効率を向上させます。
- メカトロニクス設計とロボット工学ライブラリ
- センサーデータ環境の構築:シーメンス、三菱、イノバンスなどのPLC信号システムをサポートし、より多くの信号アクセスデバイスのカスタマイズをサポート
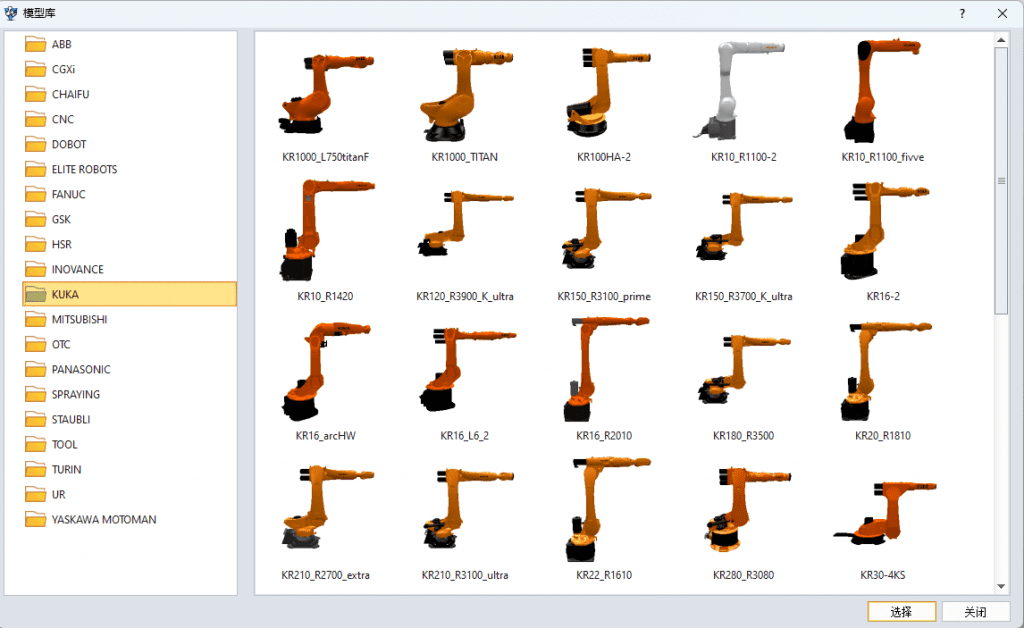
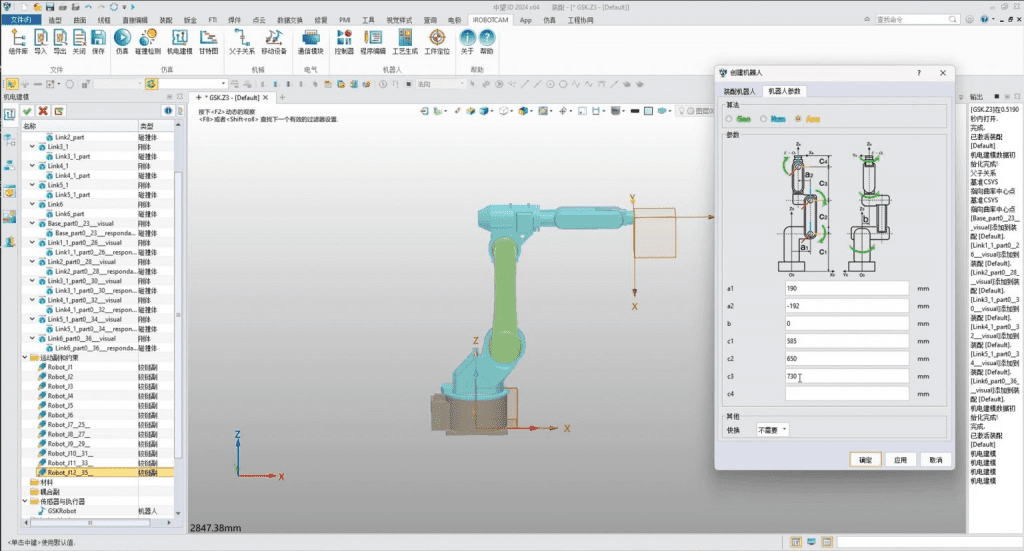
- ロボットライブラリの構築:産業用ロボットの場合、ABB、KUKA、安川電機、ファナック、Estun、Guangzhou CNC、Huazhong CNC、Yuejiang、AUBO、Turingなどの組み込みロボットライブラリを利用してロボットシミュレーションモデルを構築したり、ロボットカスタマイズ機能を利用して独自のロボットライブラリを構築したりできます。ヒューマノイドロボットや車輪型ロボットの場合、必要に応じて対応するパーツの詳細な関節情報を設定し、全体的な関節定義、衝突検出などを構築することで、完全なヒューマノイドロボットや車輪型ロボット専用ライブラリを構築できます。
- ロボットの訓練
- ロボット軌道計画モデルの構築:マルチマシンIO通信シミュレーション、マルチロボット同期、ロボット多軸連携計画をサポートします。
- ロボットによってトレーニングされた物理モデルのトレーニング: 障害物回避要件、衝突分析、その他のデータ モデルを含む独自の物理エンジンを使用して物理特性のシミュレーションをサポートし、特定のシナリオでのロボットのトレーニング アルゴリズムをサポートするためのサードパーティ インターフェイスの拡張をサポートします。
- ROSロボットとのデータドッキングによる共同デバッグの実現
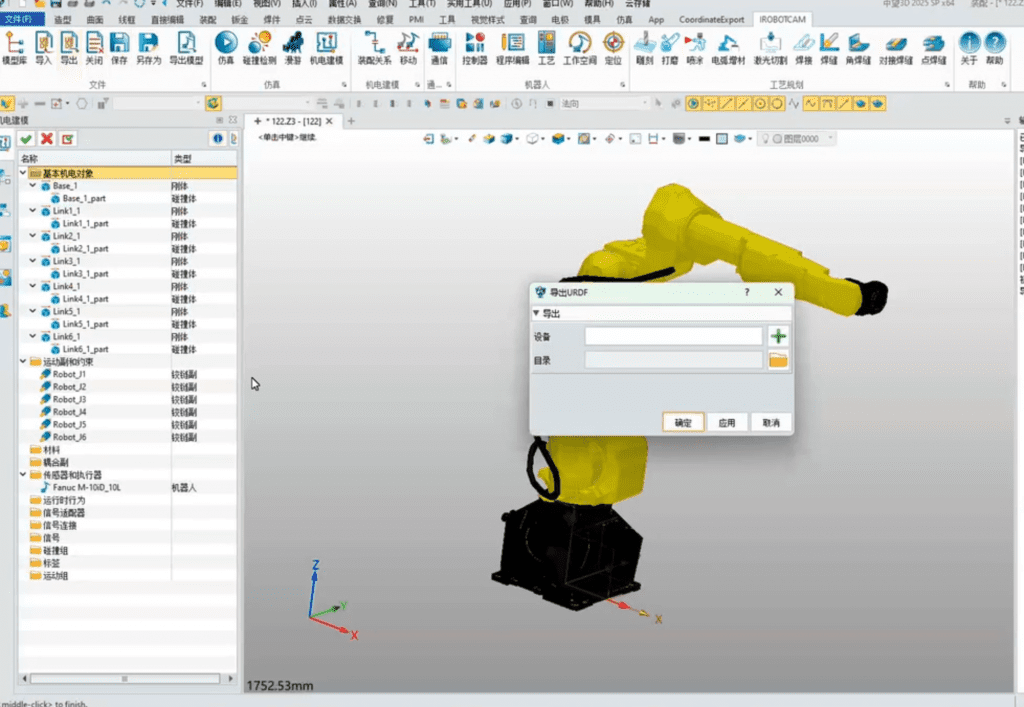
- iRobotCAMによって完成したロボット最適化モデルは、ROSロボットのさらなるシミュレーションと実行のためにURDFにエクスポートできます。
- URDF のインポート機能を使用すると、ロボット ベース モデルを iRobotCAM にインポートし、ロボット データ環境をさらに変更して iRobotCAM 上でトレーニングし、ロボットのデータ モデルの設計目標を満たすことができます。
Yueqing Technologyについて
Yueqing Technology は、生産ラインの電気機械概念設計、ロボット処理プログラミングシミュレーション、仮想デバッグを統合したデジタルソリューションであるオープンな iRobotCAM ロボット オフライン プログラミング プラットフォームの構築に取り組んでいます。
iRobotCAM ウェブサイト: www.iRobotCAM.com; お問い合わせ: collaboration@iRobotCAM.com


