Abstrakt: Robotické laserové zpracování je stále více využíváno a rychlé programování a simulace technologie robotického zpracování může snadno ověřit správnost procesu. Jako zástupce domácího softwaru pro offline programování robotů může iRobotCAM pomocí přátelského programovacího procesu iRobotCAM dosáhnout Pro programování procesů a ověřování simulace dále poskytuje pohodlí obrábění laserového zpracování.
Zrod jakékoli technologie zpracování spočívá v řešení určitých typů problémů v průmyslových aplikacích. Aplikace laseru se stále více rozšiřuje, a to především proto, že při regulovatelné energii laseru lze realizovat složitější technologii zpracování, takže je možné jej použít v různých typech jednoduchého dvouosého až pětiosého laserového řezání, nebo složitějších leteckých a jiných dílů. Obor laserového svařování dále vyhovuje procesním potřebám různých typů dílů. Pro lepší využití robotického laserového zpracování jsou kromě hardwarových možností samotného laseru kladeny další požadavky na pohodlí a přesnost trajektorií a simulací generování procesů.
Pro robotické laserové zpracování, vezmeme-li jako příklad obtíže v technologii laserového řezání, existují zejména následující
- Nízká účinnost polohování a korekce a špatná adaptabilita : Metody polohování liniového laseru nebo polohování rezistoru mají svá omezení. Průsečík čárového laseru je citlivý na rušení a umístění rezistoru má požadavky na umístění obrobku. Polohování a korekce Pokud dojde k odchylce v uložení obrobku, je snadné polohování selhat. U velkých nebo složitých obrobků je třeba skenovat všechny hrany jednu po druhé, což je méně efektivní. A tyto metody obvykle poskytují pouze lokální korekci polohy a mají špatnou adaptabilitu na obloukovité díly speciálního tvaru.
- Plánování trajektorie robota : Přestože programování trajektorie robota je flexibilní, v některých složitých nebo choulostivých řezných úlohách je stále problém, jak optimalizovat trajektorii pohybu robota za účelem zlepšení efektivity a kvality řezání.
- Údržba a kalibrace zařízení : Roboty pro řezání laserem zahrnují více přesných součástí, jako jsou laserové zářiče, senzory a robotická ramena. Údržba a kalibrace těchto součástí je zásadní pro udržení přesnosti řezání a prodloužení životnosti zařízení. Nicméně, jak provádět pravidelnou údržbu a kalibraci a jak rychle reagovat na poruchy zařízení, to vše jsou problémy, kterým je třeba čelit v procesu robotického laserového řezání.
Jako offline programovací a simulační software pro roboty se iRobotCAM zaměřuje na procesní požadavky robotického laserového zpracování a je založen na akumulaci výzkumu a vývoje v oblasti svařování v posledních deseti letech.
- S využitím škálovatelnosti trojrozměrné CAD platformy je realizována automatizace extrakce trajektorií laserového svařování a dále je dosaženo přesné kontroly laserových trajektorií.
- S využitím dlouholetých zkušeností s výzkumem a vývojem robotických fyzikálních motorů můžeme rychle realizovat simulaci robotických laserových procesů a realizovat digitální dvojče obráběcího procesu.
- Pomocí modulů pro generování trajektorie a optimalizace trajektorie iRobotCAM lze trajektorii robota automaticky upravit, aby se zabránilo kolizím, singulárním bodům a nedosažitelným bodům.
- Kombinací návrhu výrobní linky iRobotCAM s programováním a simulací robotů může iRobotCAM realizovat návrh a simulaci na úrovni výrobní linky a dosáhnout tak integrace návrhu a simulace.
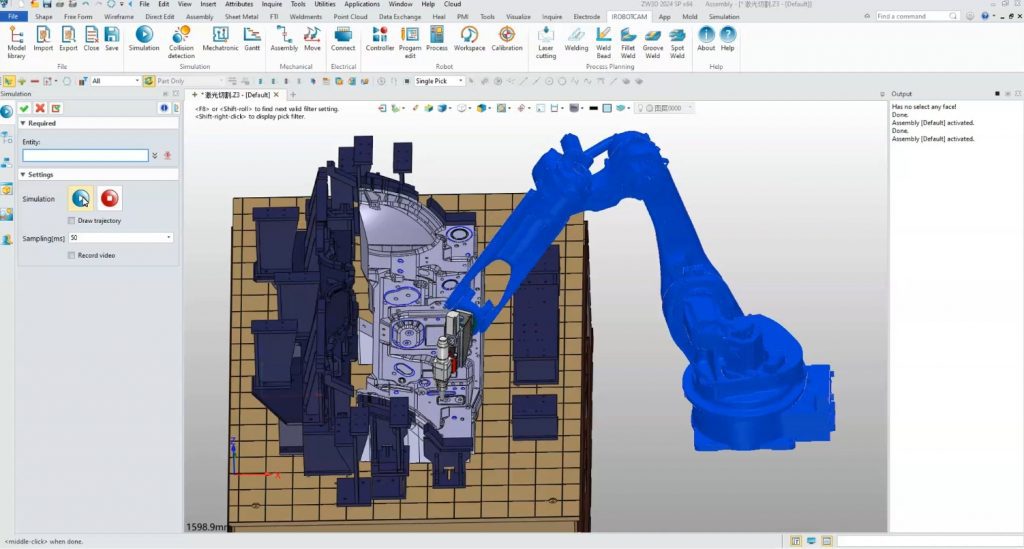
Pojďme se podívat, jak může iRobotCAM jednoduše implementovat programování a simulaci robotického laserového zpracování.
O technologii Yueqing :
Yueqing Technology se zavázala k vybudování otevřené offline programovací platformy robotů iRobotCAM, což je digitální řešení integrující elektromechanický koncepční návrh výrobních linek, simulaci programování zpracování robotů a virtuální ladění.


