Streszczenie: Obróbka laserowa robotów jest coraz częściej stosowana, a szybkie programowanie i symulacja technologii obróbki robotów mogą łatwo zweryfikować poprawność procesu. Jako przedstawiciel domowego oprogramowania do programowania robotów offline, iRobotCAM, wykorzystując przyjazny proces programowania iRobotCAM, może osiągnąć W celu programowania procesu i weryfikacji symulacji, zapewnia ponadto wygodę obróbki laserowej.
Narodziny każdej technologii przetwarzania mają na celu rozwiązanie pewnych typów problemów w zastosowaniach przemysłowych. Zastosowanie lasera staje się coraz bardziej powszechne, głównie dlatego, że gdy energia lasera jest kontrolowana, można zrealizować bardziej złożoną technologię przetwarzania, dzięki czemu można jej używać w różnych typach prostego cięcia laserowego od dwóch do pięciu osi lub bardziej złożonych części lotniczych i innych. Dziedzina spawania laserowego dodatkowo spełnia potrzeby procesowe różnych typów części. Aby lepiej wykorzystać robotyczne przetwarzanie laserowe, oprócz możliwości sprzętowych samego lasera, stawiane są dalsze wymagania dotyczące wygody i dokładności trajektorii generowania procesów i symulacji.
W przypadku obróbki laserowej robotem, biorąc za przykład trudności w technologii cięcia laserowego, występują głównie następujące problemy:
- Niska wydajność pozycjonowania i korekcji oraz słaba adaptowalność : Metody pozycjonowania lasera liniowego lub rezystora mają swoje ograniczenia. Przecięcie lasera liniowego jest podatne na zakłócenia, a pozycjonowanie rezystora ma wymagania dotyczące umiejscowienia przedmiotu obrabianego. Pozycjonowanie i korekcja Jeśli występuje jakiekolwiek odchylenie w umiejscowieniu przedmiotu obrabianego, łatwo jest popełnić błąd w pozycjonowaniu. W przypadku dużych lub złożonych przedmiotów obrabianych wszystkie krawędzie muszą być skanowane jedna po drugiej, co jest mniej wydajne. A te metody zwykle zapewniają tylko lokalną korektę położenia i mają słabą adaptowalność do łukowatych części o specjalnych kształtach.
- Planowanie trajektorii robota : Mimo że programowanie trajektorii robota jest elastyczne, w przypadku niektórych złożonych lub delikatnych zadań cięcia optymalizacja trajektorii ruchu robota w celu zwiększenia wydajności i jakości cięcia nadal stanowi wyzwanie.
- Konserwacja i kalibracja sprzętu : Roboty do cięcia laserowego obejmują wiele precyzyjnych komponentów, takich jak emitery laserowe, czujniki i ramiona robota. Konserwacja i kalibracja tych komponentów ma kluczowe znaczenie dla utrzymania dokładności cięcia i wydłużenia żywotności sprzętu. Jednak sposób wykonywania regularnej konserwacji i kalibracji oraz sposób szybkiego reagowania na awarie sprzętu to kwestie, z którymi należy się zmierzyć w procesie cięcia laserowego robota.
iRobotCAM, jako oprogramowanie do programowania i symulacji robotów w trybie offline, jest dostosowane do wymagań procesowych obróbki laserowej robotów i opiera się na badaniach i pracach rozwojowych prowadzonych w dziedzinie spawalnictwa na przestrzeni ostatnich dziesięciu lat.
- Wykorzystując skalowalność trójwymiarowej platformy CAD, zrealizowano automatyzację ekstrakcji trajektorii spawania laserowego, co pozwoliło na jeszcze dokładniejszą kontrolę trajektorii lasera.
- Wykorzystując wieloletnie doświadczenie w badaniach i rozwoju silników fizyki robotów, możemy szybko przeprowadzić symulację procesów laserowych robotów i stworzyć cyfrowego bliźniaka procesu obróbki.
- Wykorzystując moduły generowania trajektorii i optymalizacji trajektorii oprogramowania iRobotCAM, można automatycznie dostosowywać trajektorię robota, aby unikać kolizji, punktów osobliwych i niedostępnych miejsc.
- Łącząc projektowanie linii produkcyjnej iRobotCAM z programowaniem i symulacją robotów, iRobotCAM może realizować projektowanie i symulację na poziomie linii produkcyjnej, osiągając integrację projektowania i symulacji.
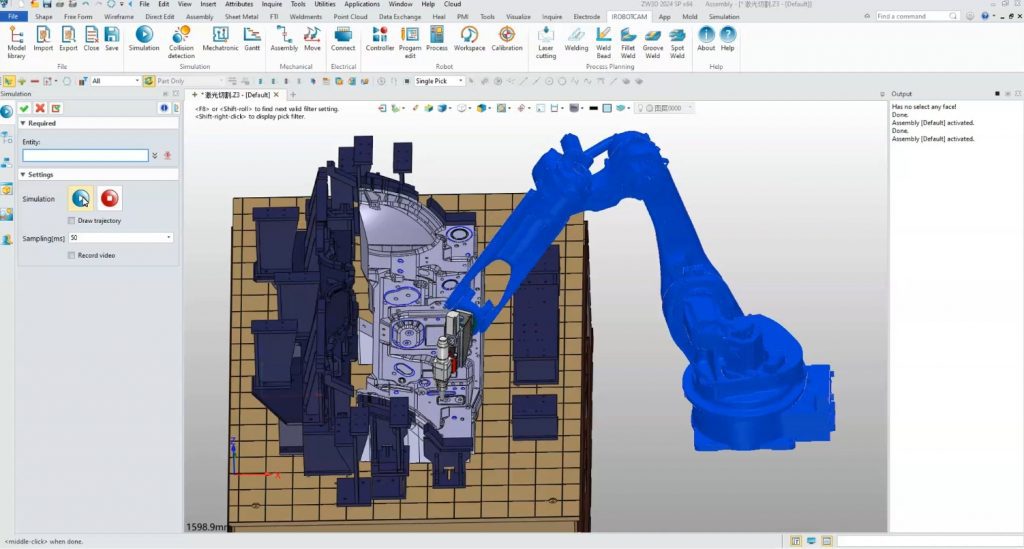
Przyjrzyjmy się, w jaki sposób iRobotCAM może łatwo wdrożyć programowanie i symulację obróbki laserowej robota.
O technologii Yueqing :
Yueqing Technology stawia sobie za cel zbudowanie otwartej platformy do programowania robotów offline iRobotCAM. Platforma ta jest cyfrowym rozwiązaniem integrującym elektromechaniczny projekt koncepcyjny linii produkcyjnych, symulację programowania przetwarzania robotów oraz wirtualne debugowanie.


