Zusammenfassung: Die robotergestützte Laserbearbeitung wird zunehmend eingesetzt. Durch die schnelle Programmierung und Simulation der Roboterbearbeitungstechnologie lässt sich die Richtigkeit des Prozesses leicht überprüfen. Als Vertreter der Offline-Programmiersoftware für Roboter im Inland ermöglicht iRobotCAM mithilfe des benutzerfreundlichen Programmierprozesses von iRobotCAM die Prozessprogrammierung und Simulationsüberprüfung und bietet darüber hinaus den Komfort der maschinellen Laserbearbeitung.
Der Ursprung jeder Verarbeitungstechnologie liegt in der Lösung bestimmter Probleme in industriellen Anwendungen. Laseranwendungen verbreiten sich immer mehr, vor allem weil die steuerbare Laserenergie komplexere Verarbeitungstechnologien ermöglicht. So können sie für verschiedene Arten des einfachen zwei- bis fünfachsigen Laserschneidens sowie für komplexere Teile in der Luftfahrt und anderen Bereichen eingesetzt werden. Das Laserschweißen erfüllt darüber hinaus die Prozessanforderungen für verschiedene Teiletypen. Um die robotergestützte Laserbearbeitung optimal zu nutzen, werden neben den Hardwarefunktionen des Lasers selbst auch Anforderungen an die Benutzerfreundlichkeit und Genauigkeit der Prozessgenerierung und -simulation gestellt.
Für die robotergestützte Laserbearbeitung gibt es am Beispiel der Schwierigkeiten der Laserschneidtechnologie vor allem folgende
- Geringe Positionierungs- und Korrektureffizienz und schlechte Anpassungsfähigkeit : Linienlaser- oder Widerstandspositionierungsmethoden haben ihre Grenzen. Der Schnittpunkt der Linienlaser ist störanfällig, und die Widerstandspositionierung stellt Anforderungen an die Platzierung des Werkstücks. Positionierung und Korrektur: Bei Abweichungen in der Platzierung des Werkstücks kann es leicht zu Positionierungsfehlern kommen. Bei großen oder komplexen Werkstücken müssen alle Kanten einzeln abgetastet werden, was weniger effizient ist. Zudem bieten diese Methoden in der Regel nur eine lokale Positionskorrektur und sind schlecht an bogenförmige Sonderformen anpassbar.
- Roboterbahnplanung : Obwohl die Roboterbahnprogrammierung flexibel ist, ist es bei einigen komplexen oder heiklen Schneidaufgaben immer noch eine Herausforderung, die Bewegungsbahn des Roboters zu optimieren, um die Schneideffizienz und -qualität zu verbessern.
- Wartung und Kalibrierung der Ausrüstung : Laserschneidroboter bestehen aus mehreren Präzisionskomponenten wie Laseremittern, Sensoren und Roboterarmen. Die Wartung und Kalibrierung dieser Komponenten ist entscheidend für die Schnittgenauigkeit und die Lebensdauer der Ausrüstung. Die regelmäßige Wartung und Kalibrierung sowie die schnelle Reaktion auf Geräteausfälle sind jedoch wichtige Aspekte beim robotergestützten Laserschneiden.
Als Software zur Offline-Programmierung und Simulation von Robotern zielt iRobotCAM auf die Prozessanforderungen der robotergestützten Laserbearbeitung ab und basiert auf den Forschungs- und Entwicklungsergebnissen der letzten zehn Jahre im Bereich Schweißen.
- Durch Ausnutzung der Skalierbarkeit der dreidimensionalen CAD-Plattform wird die Automatisierung der Extraktion von Laserschweißbahnen realisiert und darüber hinaus eine präzise Steuerung der Laserbahnen erreicht.
- Dank unserer jahrelangen Erfahrung in der Forschung und Entwicklung von Roboterphysik-Engines können wir die Simulation von Roboterlaserprozessen schnell realisieren und den digitalen Zwilling des Bearbeitungsprozesses erstellen.
- Mithilfe der Module zur Trajektoriengenerierung und Trajektorienoptimierung von iRobotCAM kann die Trajektorie des Roboters automatisch angepasst werden, um Kollisionen, singuläre Punkte und unerreichbare Punkte zu vermeiden.
- Durch die Kombination des Produktionsliniendesigns von iRobotCAM mit der Roboterprogrammierung und -simulation kann iRobotCAM Design und Simulation auf Produktionslinienebene realisieren und so eine Integration von Design und Simulation erreichen.
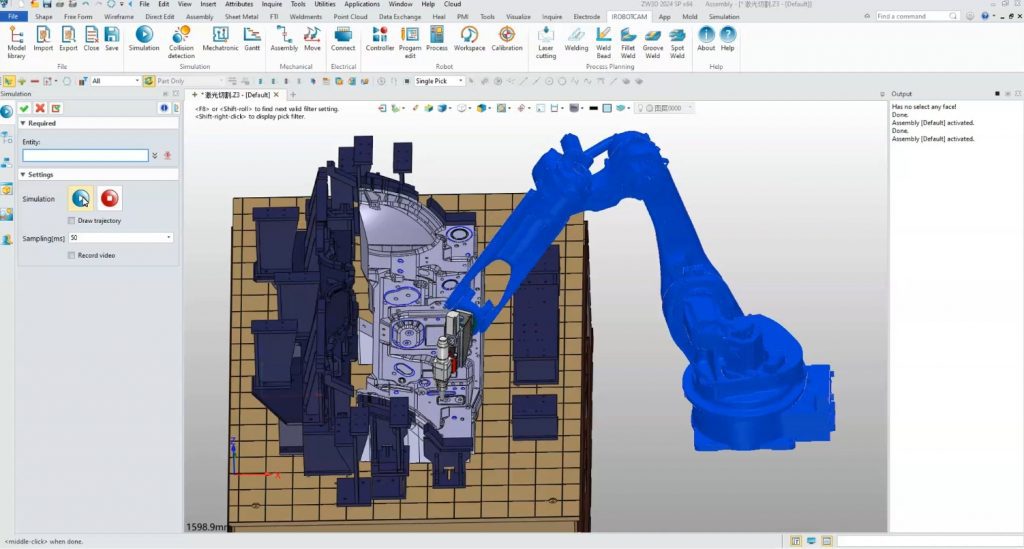
Sehen wir uns an, wie die Programmierung und Simulation der Roboter-Laserbearbeitung mit iRobotCAM einfach umgesetzt werden kann.
Über Yueqing Technology :
Yueqing Technology hat sich zum Ziel gesetzt, eine offene Offline-Programmierplattform für iRobotCAM-Roboter zu entwickeln. Dabei handelt es sich um eine digitale Lösung, die die elektromechanische Konzeption von Produktionslinien, die Simulation der Roboterverarbeitungsprogrammierung und virtuelles Debugging integriert.


