Resumen: Wuhan Needs Intelligence ha llegado a una cooperación con Nanjing Yueqing Technology para realizar el prototipo gemelo digital del robot, demostrar la correlación entre la enseñanza del robot y la programación de aplicaciones del robot y demostrar intuitivamente los escenarios de aplicación del robot.
Wuhan Needs Intelligence ha llegado a una cooperación con Nanjing Yueqing Technology para realizar gemelos digitales del mundo físico y el mundo virtual para escenarios de aplicación de robots, realizar el software de programación fuera de línea del robot iRobotCAM y la comunicación PLC de robots que necesitan inteligencia, control preciso de movimientos articulares, etc., utilizando el modelo de aplicación gemelo digital muestra la correlación entre la enseñanza del robot y la programación de aplicaciones del robot, y muestra intuitivamente los escenarios de aplicación de los robots.
Para la aplicación de gemelos digitales, actualmente existen dos rutas técnicas diferentes en la industria.
La ruta de realidad virtual que se centra en los efectos de simulación generalmente utiliza motores de juego como Unity como tecnología básica y se desarrolla aún más en función de las características de la industria para personalizar los efectos de aplicación de simulación requeridos.
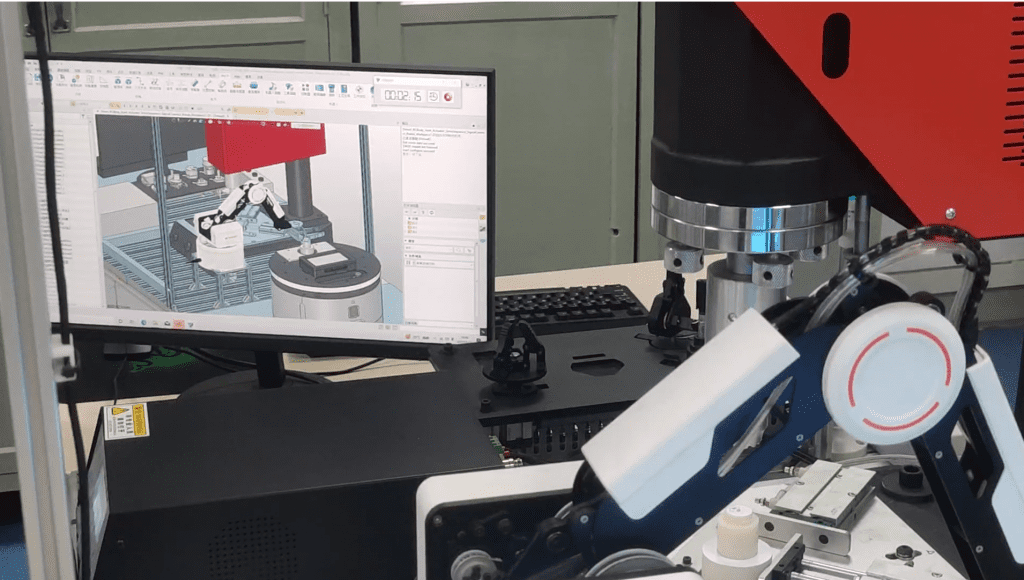
Basándose en el modelado físico, al establecer un puente entre el mundo físico y el mundo virtual, se realiza la interacción entre la realidad y la virtualidad, y se crea un verdadero gemelo digital.
En términos de aplicación tecnológica, el mundo gemelo digital formado mediante el modelado del mundo físico suele requerir mayor inversión en I+D, en comparación con los modelos abstractos discretos de elementos clave del mundo físico real. Sin embargo, para aplicaciones industriales, esta verdadera arquitectura de gemelo digital ofrece un mayor valor. Permite presentar eficazmente escenas físicas complejas en el mundo virtual y, además, impulsar cambios en el mundo físico mediante una mayor depuración virtual de robots.
En el campo de aplicación de los robots industriales, la selección técnica del software de programación fuera de línea de iRobotCAM se basa en datos CAD para lograr la interoperabilidad entre el mundo físico y el virtual, y así lograr aplicaciones de gemelos digitales. En concreto, ¿cómo logra el software de programación fuera de línea de iRobotCAM construir el entorno de programación virtual de iRobotCAM?
- Simulación de ensamblaje de motores, incluidos robots, dispositivos de cambio rápido, líneas transportadoras y varios sensores.
- Simulación sincrónica virtual y real, recopilación de datos de la línea de producción y mapeo de datos del controlador de movimiento y datos del PLC al sistema de simulación
- Admite simulación de sistemas, incluyendo líneas transportadoras, multirrobots y sistemas de materiales.
Al crear rápidamente escenarios de aplicación y conectarse a los módulos de comunicación correspondientes, iRobotCAM puede realizar escenarios de aplicación de depuración virtual de robots y gemelos digitales.
Acerca de iRobotCAM :
Yueqing Technology se dedica a desarrollar soluciones todo en uno para el diseño de líneas de producción, programación fuera de línea de robots y depuración virtual.
Sitio web de iRobotCAM: www.iRobotCAM.com, Correo electrónico: Cooperation@iRobotCAM.com


