Streszczenie: Wuhan Needs Intelligence nawiązało współpracę z Nanjing Yueqing Technology w celu stworzenia prototypu cyfrowego bliźniaka robota, zademonstrowania korelacji między nauczaniem robota a programowaniem aplikacji robota oraz intuicyjnego zaprezentowania scenariuszy zastosowań robota.
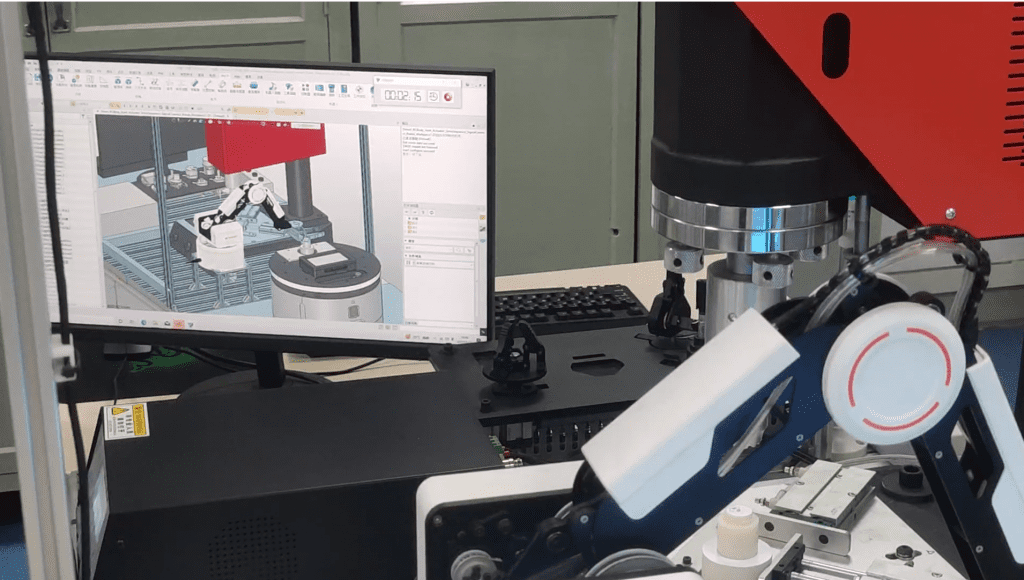
Wuhan Needs Intelligence nawiązało współpracę z Nanjing Yueqing Technology w celu stworzenia cyfrowych bliźniaków świata fizycznego i wirtualnego na potrzeby scenariuszy zastosowań robotów, opracowania oprogramowania do programowania robotów w trybie offline iRobotCAM oraz komunikacji PLC robotów wymagających inteligencji, precyzyjnej kontroli ruchów stawów itp. przy użyciu cyfrowego modelu aplikacji bliźniaczych. Model ten pokazuje korelację między nauczaniem robotów a programowaniem zastosowań robotów i intuicyjnie wyświetla scenariusze zastosowań robotów.
W branży istnieją obecnie dwie różne ścieżki techniczne wdrażania cyfrowych bliźniaków.
Technologia wirtualnej rzeczywistości, która koncentruje się na efektach symulacji, zazwyczaj wykorzystuje jako technologię podstawową silniki gier, np. Unity, a następnie jest rozwijana w oparciu o specyfikę branży, aby dostosować wymagane efekty symulacji.
Na podstawie modelowania fizycznego i poprzez ustanowienie pomostu między światem fizycznym i wirtualnym realizowana jest interakcja między rzeczywistością i wirtualnością, dzięki czemu powstaje prawdziwy cyfrowy bliźniak.
Pod względem zastosowania technologii, cyfrowy świat bliźniaczy utworzony przez modelowanie świata fizycznego często wymaga większych inwestycji w badania i rozwój w obliczu dyskretnych abstrakcyjnych modeli kluczowych elementów fizycznego świata rzeczywistego. Jednak w przypadku zastosowań przemysłowych ta prawdziwa architektura cyfrowego bliźniaka ma większą wartość. Może skutecznie prezentować złożone sceny fizyczne w świecie wirtualnym, a także może dalej napędzać zmiany w świecie fizycznym poprzez dalsze wirtualne debugowanie robotów.
W przypadku obszarów zastosowań robotów przemysłowych, jeśli chodzi o techniczny wybór oprogramowania do programowania robotów offline iRobotCAM, wybór iRobotCAM opiera się na danych CAD, aby osiągnąć interoperacyjność między światem fizycznym a światem wirtualnym i zrealizować prawdziwe aplikacje cyfrowego bliźniaka. W szczególności, w jaki sposób oprogramowanie do programowania robotów przemysłowych offline iRobotCAM realizuje konstrukcję wygodnego wirtualnego środowiska programowania iRobotCAM?
- Symulacja montażu silników, w tym robotów, urządzeń szybkiej wymiany, linii przenośnikowych i różnych czujników
- Wirtualna i rzeczywista symulacja synchroniczna, zbieranie danych z linii produkcyjnej i mapowanie danych ze sterownika ruchu i PLC do systemu symulacyjnego
- Obsługuje symulację systemu, w tym linie przenośników, wiele robotów i systemy materiałowe. Obsługuje symulacje systemu, w tym linie przenośników, wiele robotów i systemy materiałowe.
Dzięki szybkiemu tworzeniu scenariuszy aplikacji i łączeniu się z odpowiednimi modułami komunikacyjnymi, iRobotCAM może realizować scenariusze aplikacji wirtualnego debugowania robotów i cyfrowego bliźniaka.
O iRobotCAM :
Firma Yueqing Technology specjalizuje się w opracowywaniu kompleksowych rozwiązań do projektowania linii produkcyjnych, programowania robotów w trybie offline i wirtualnego debugowania.
Strona internetowa iRobotCAM: www.iRobotCAM.com, e-mail: collaboration@iRobotCAM.com


