초록: 블레이드와 같은 복잡한 작업물을 가공하는 로봇 레이저 클래딩 가공의 어려움은 고정밀 특성을 활용하는 데 있으며, 3D CAD 커널을 기반으로 한 iRobotCAM의 기술적 구조적 장점은 고정밀 요구 사항을 효과적으로 충족시켜 5축 블레이드의 고정밀 레이저 클래딩 가공을 실현할 수 있습니다.
블레이드의 설계 및 가공은 소형 선풍기 블레이드부터 항공기 블레이드까지 다양한 적용 시나리오에 맞춰 특정 상황에 맞게 조정되어야 합니다. 산업 제품의 다양한 적용 시나리오는 디자인 요소가 서로 다르며, 어떤 것은 미관을 중시하고, 어떤 것은 저소음, 어떤 것은 성능을 중시합니다. 블레이드가 최종적으로 요구 사항을 충족하는지 여부는 다양한 산업의 요구 사항과 다양한 가공 방법의 요구 사항을 고려해야 합니다. 핵심은 정밀성 제어이며, 정확도만이 효과적으로 제어될 수 있습니다. 다양한 시나리오의 요구를 충족하는 방법이 있습니다. 블레이드의 로봇 레이저 클래딩 가공을 예로 들면, iRobotCAM은 CAD 기반 아키텍처를 활용하여 고정밀 아키텍처의 장점을 가지고 있습니다. 이를 레이저 클래딩 가공에 효과적으로 적용하려면 어떻게 해야 할까요?
로봇 레이저 가공 응용 분야의 경우 일반적인 프로세스는 다음과 같습니다.
로봇 및 작업물 가져오기 > 작업물 위치 지정 및 로봇 교정 > 궤적 프로그래밍 구현 > 모든 장면 시뮬레이션 > 코드 출력 및 로봇 처리
- 3D CAD 플랫폼 기반의 iRobotCAM의 특성을 활용하고 3D로 살펴보면 로봇 적용 시나리오의 디지털 모델을 빠르게 구축할 수 있습니다.
- iRobotCAM의 전기기계 모듈과 사전 설정된 로봇 라이브러리를 사용하여 로봇 장면에 대한 관련 로봇, 도구 등을 정의할 수 있습니다.
- 레이저 가공 공정의 요구 사항에 따라 특정 시나리오의 궤적 요구 사항을 충족하기 위해 다양한 2축에서 5축 궤적이 생성됩니다.
- iRobotCAM의 물리 엔진을 기반으로 로봇의 움직임을 시뮬레이션하고 보정하며, 해당 실행 코드를 출력합니다.
기술 아키텍처 외에도 사용자가 가장 직접적으로 느끼는 부분은 로봇 소프트웨어 프로그래밍의 용이성이며, 사용자 경험은 핵심 지표 중 하나입니다. 솔직히 말해서 산업용 소프트웨어의 발전은 하루아침에 이루어지는 것이 아닙니다. 기술 아키텍처부터 사용자 경험까지, 국내 산업용 소프트웨어는 최근 몇 년간 눈부신 발전을 이루었습니다. 오랜 기간 외국 소프트웨어가 등장한 지금, 국내 산업용 소프트웨어를 사용해 보는 것도 나쁘지 않습니다. 로봇 오프라인 프로그래밍 소프트웨어를 선택하려면 iRobotCAM을 사용해 보는 것도 좋습니다.
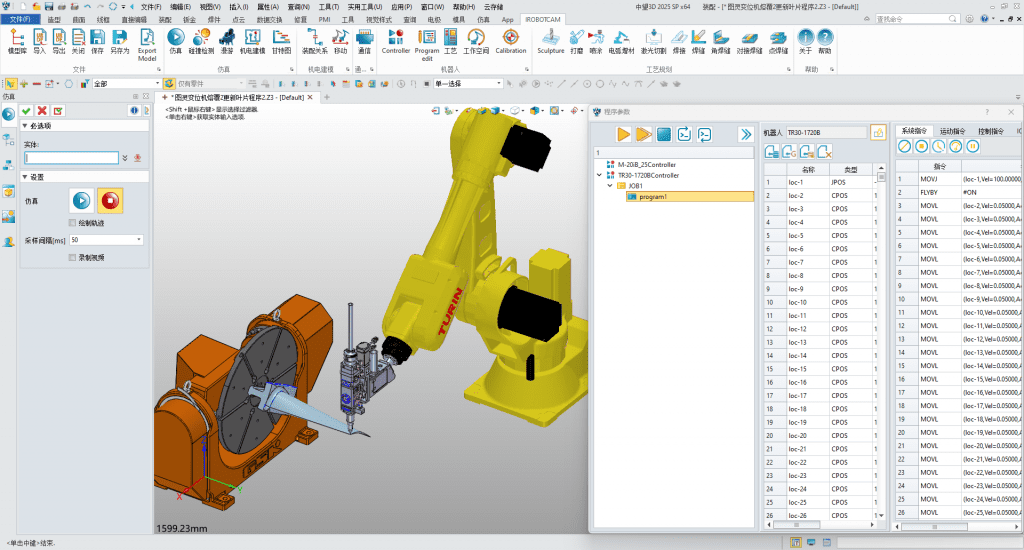
예를 들어 토리노 로봇을 사용하여 5축 블레이드의 레이저 클래딩 가공을 실현할 때, iRobotCAM은 어떻게 로봇 레이저 가공을 단계별로 쉽게 실현할 수 있을까요?
Yueqing Technology 소개
웨칭 테크놀로지는 생산 라인의 전기기계 개념 설계, 로봇 가공 프로그래밍 시뮬레이션, 가상 디버깅을 통합한 디지털 솔루션인 개방형 iRobotCAM 로봇 오프라인 프로그래밍 플랫폼을 구축하는 데 전념하고 있습니다.
iRobotCAM 웹사이트: www.iRobotCAM.com, 문의: cooperation@iRobotCAM.com


