Resumen: La aplicación de robots colaborativos permite reducir una gran cantidad de trabajo manual repetitivo y mejorar considerablemente la eficiencia de la producción. La base de diversas aplicaciones colaborativas de robots reside en la programación y simulación de robots. Gracias al software doméstico de programación fuera de línea iRobotCAM, robots colaborativos como Yuejiang pueden utilizarse rápidamente para realizar la programación y la simulación virtual de robots.
Con la creciente flexibilidad de las aplicaciones robóticas, especialmente el alto grado de libertad y la alta precisión de los robots colaborativos, industrias como la aeronáutica, la automovilística y la electrónica han adoptado un gran número de robots colaborativos para reducir el trabajo manual repetitivo y mejorar considerablemente la eficiencia de la producción. La programación y simulación de diversos escenarios colaborativos con robots son la base de las aplicaciones robóticas colaborativas. Este artículo presentará iRobotCAM, un software de programación offline de robots domésticos desarrollado con base en una plataforma de modelado CAD 3D, y tomará como ejemplo el robot colaborativo debot para explicar cómo utilizar rápidamente los robots colaborativos debot para realizar la programación de soldadura robótica y la simulación virtual.
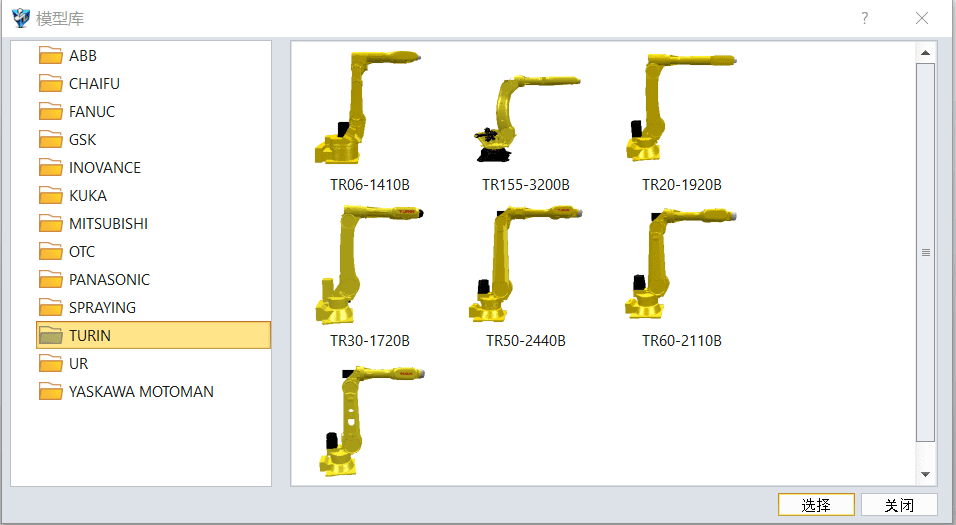
- Con la biblioteca de robots de iRobotCAM, puede usar bibliotecas de robots existentes de ABB, ZF, FANUC, Guangzhou CNC, Inovance, Kuka, Mitsubishi, Panasonic, Zhihui, Turín, UR, Yaskawa y otras, o crear rápidamente nuevas bibliotecas de robots colaborativos, como debot Robotics, según sea necesario. La biblioteca se puede crear mediante definiciones de articulaciones sencillas.
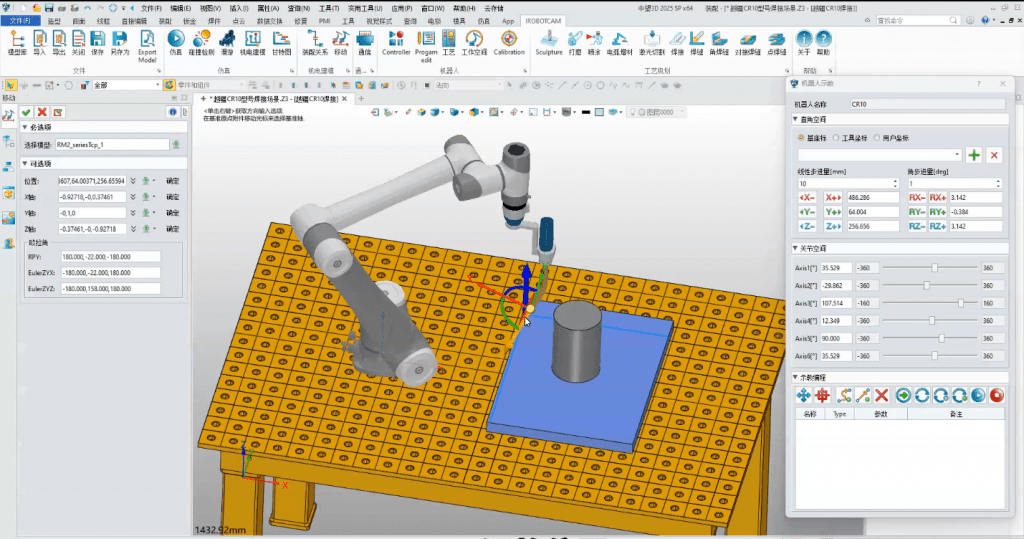
2. Utilice la práctica función de enseñanza de iRobotCAM para lograr la programación de enseñanza simplemente arrastrando y soltando
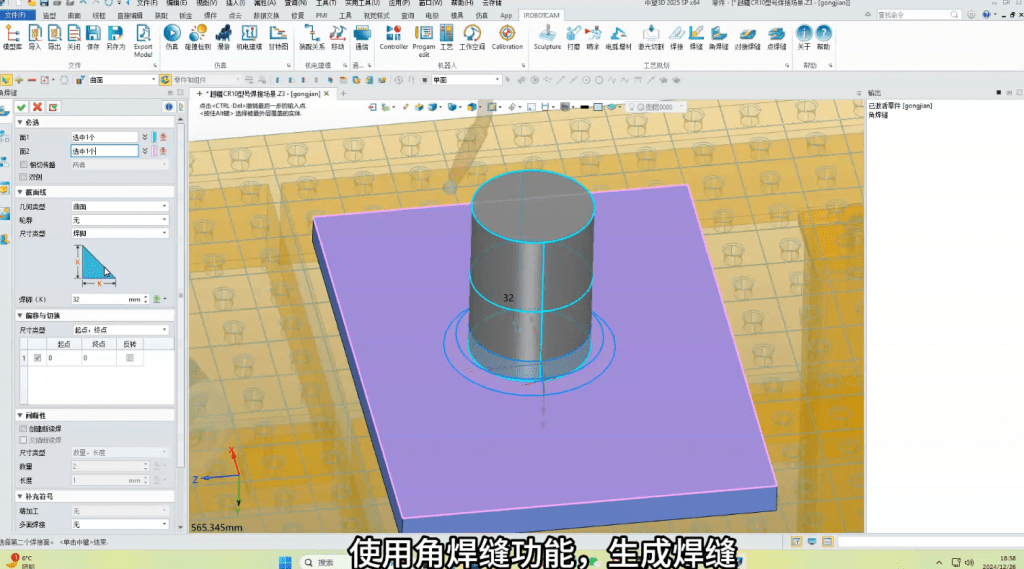
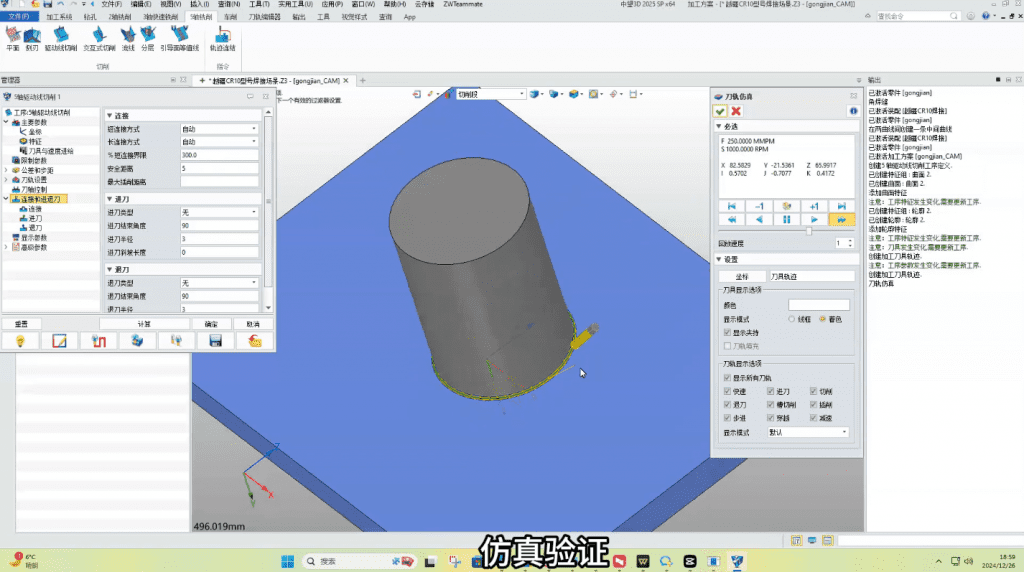
3. Utilizando el módulo de soldadura, puede marcar rápidamente la posición de soldadura y generar programas de funciones de soldadura.
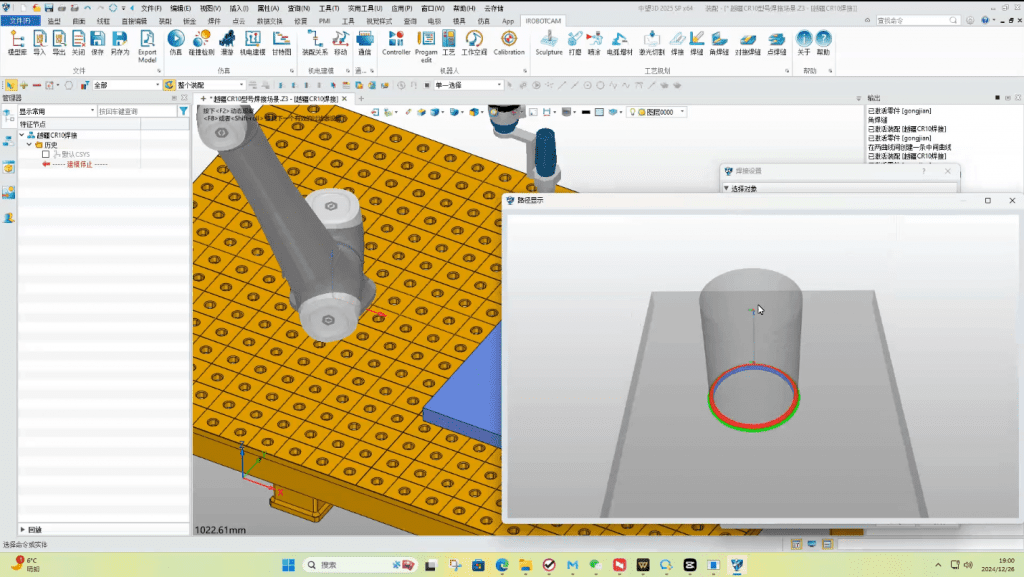
4. Gracias a las amplias capacidades de trayectoria de dos a cinco ejes de iRobotCAM, puede generar rápidamente trayectorias de programación de soldadura y simularlas.
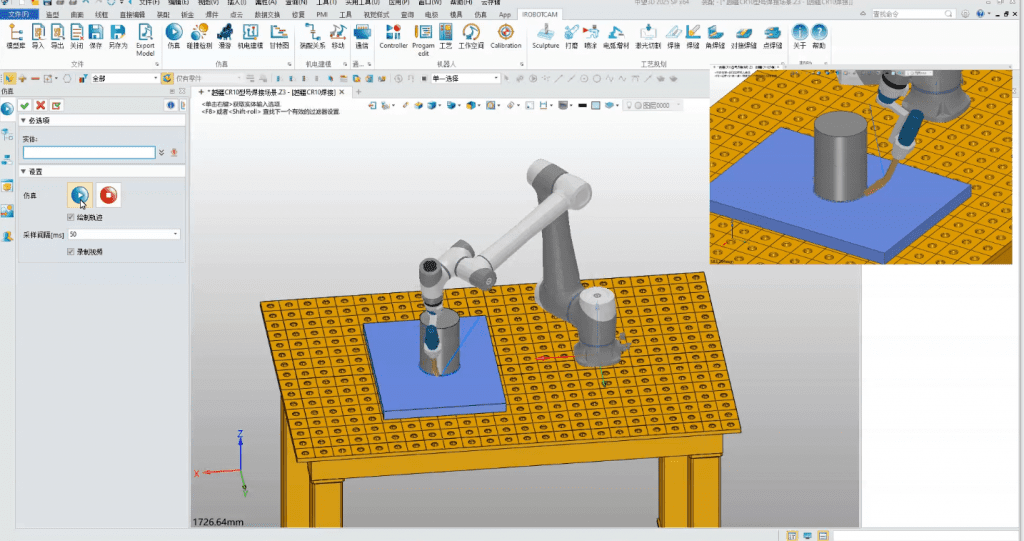
Al utilizar el efecto de procesamiento de simulación de robot de iRobotCAM, se puede verificar y simular aún más el efecto de soldadura del robot.
6. Para escenarios de aplicación de robot, se puede utilizar iRobotCAM para simular la escena de soldadura general del robot y ver intuitivamente el proceso de soldadura.
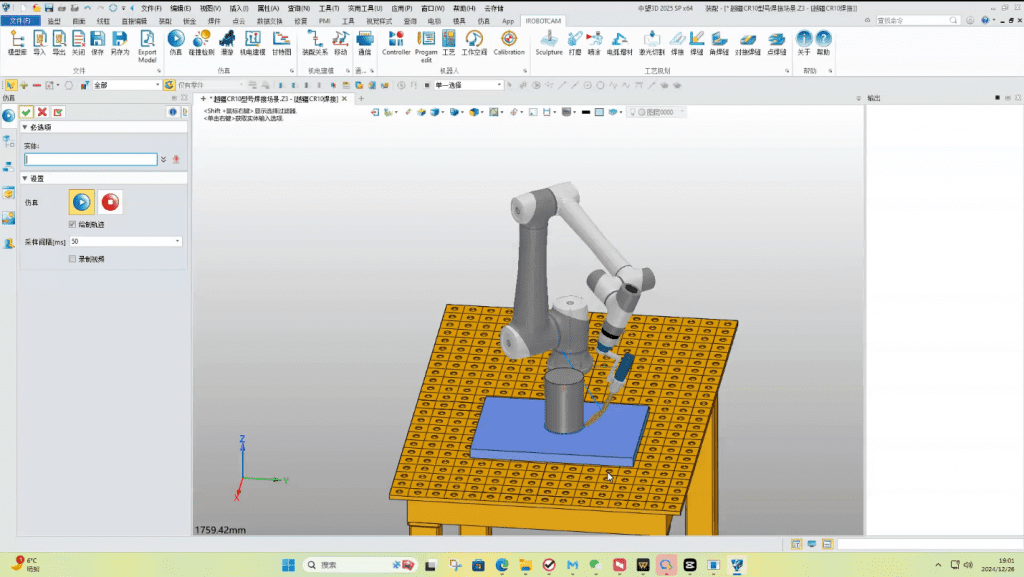
A continuación se muestra un vídeo que muestra la programación y simulación de soldadura utilizando el robot colaborativo debot.
Acerca de Yueqing Technology
Yueqing Technology se ha comprometido a construir una plataforma abierta de programación fuera de línea de robots iRobotCAM, que es una solución digital que integra el diseño conceptual electromecánico de líneas de producción, la simulación de programación de procesamiento de robots y la depuración virtual.
Sitio web de iRobotCAM: www.iRobotCAM.com; Contacto: Cooperation@iRobotCAM.com


