Resumo: A aplicação de robôs colaborativos ajuda a libertar uma grande quantidade de trabalho manual repetitivo e melhora muito a eficiência da produção. A base de várias aplicações colaborativas de robôs está na programação e simulação de robôs. Através do software de programação offline de robôs domésticos iRobotCAM, os robôs colaborativos como o Yuejiang podem ser utilizados rapidamente para realizar a programação de robôs e a simulação virtual.
Com a crescente flexibilidade das aplicações de robôs, especialmente o elevado grau de liberdade e a elevada precisão dos robôs colaborativos, indústrias como a aviação, a automóvel e a eletrónica adotaram um grande número de robôs colaborativos para libertar o trabalho manual repetitivo e melhorar significativamente a eficiência da produção. A programação e a simulação de vários cenários colaborativos de robôs são a base das aplicações de robôs colaborativos. Este artigo apresentará o iRobotCAM, um software de programação offline de robôs domésticos desenvolvido com base na plataforma de modelação CAD 3D, e utilizará o robô colaborativo Debot como exemplo para apresentar como utilizar rapidamente os robôs colaborativos Debot para realizar a programação de soldadura de robôs e simulação virtual.
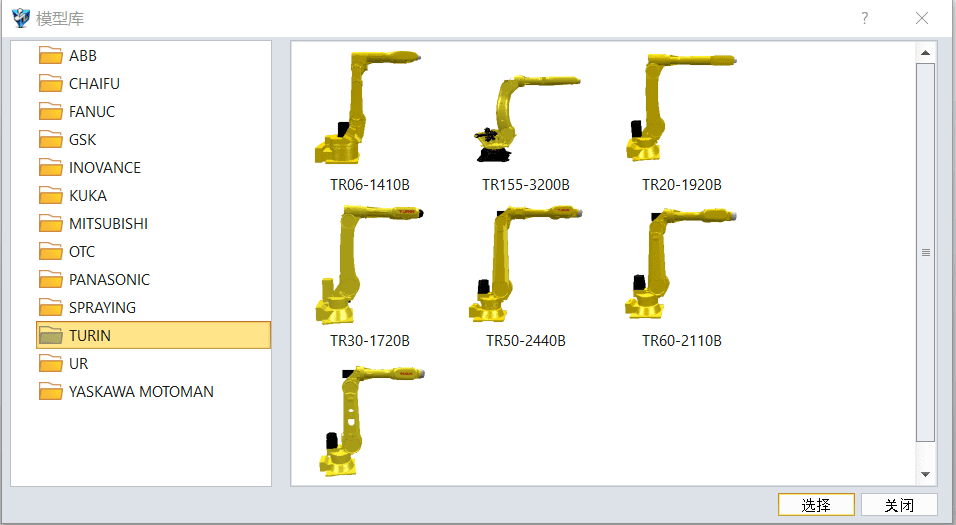
- Com a biblioteca de robôs do iRobotCAM, pode utilizar bibliotecas de robôs existentes da ABB, ZF, FANUC, Guangzhou CNC, Inovance, Kuka, Mitsubishi, Panasonic, Zhihui, Turin, UR, Yaskawa e outras, ou criar rapidamente novas bibliotecas de robôs colaborativos, como a debot Robotics, conforme necessário. A biblioteca pode ser estabelecida através de definições conjuntas simples.
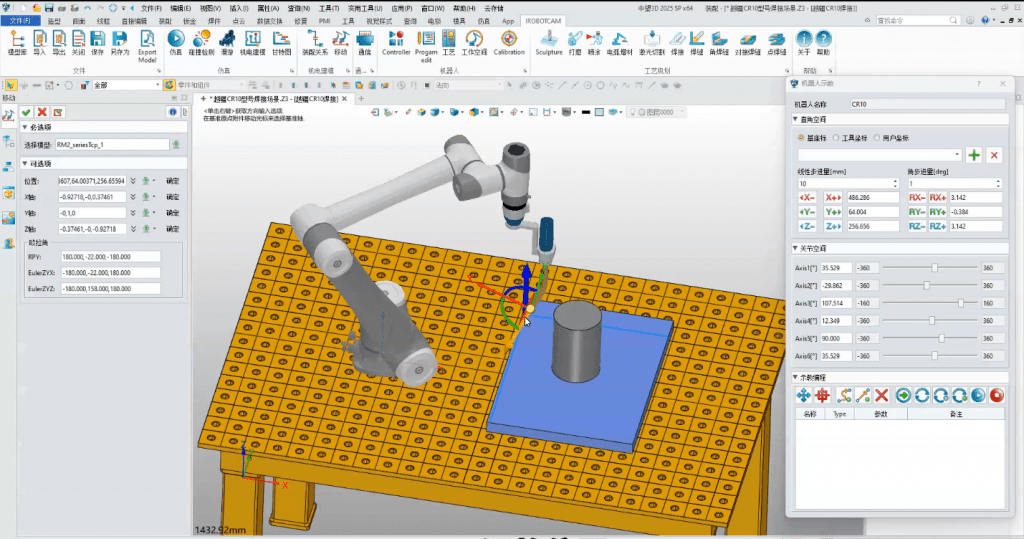
2. Utilize a função de ensino conveniente do iRobotCAM para obter o ensino de programação simplesmente arrastando e largando
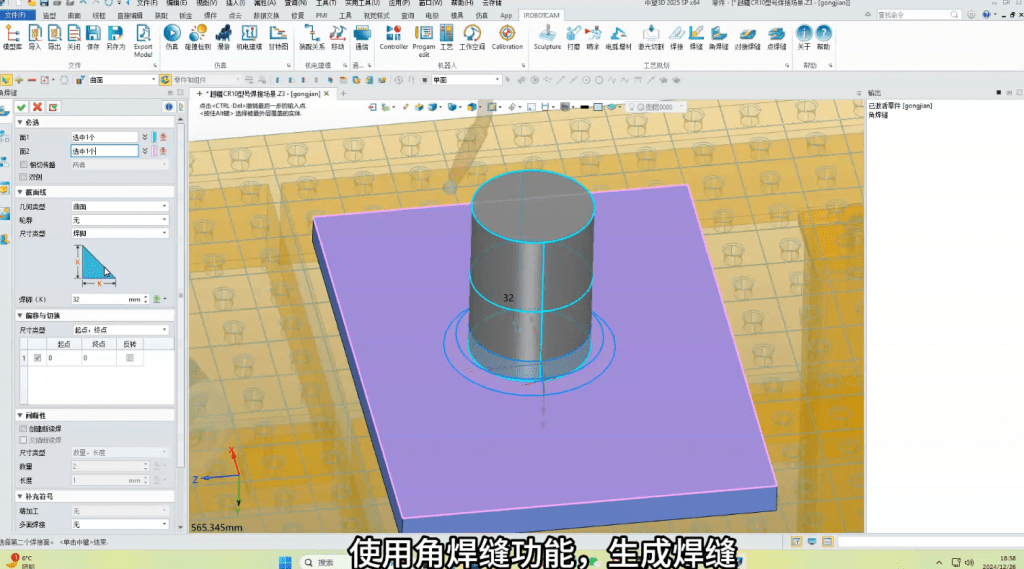
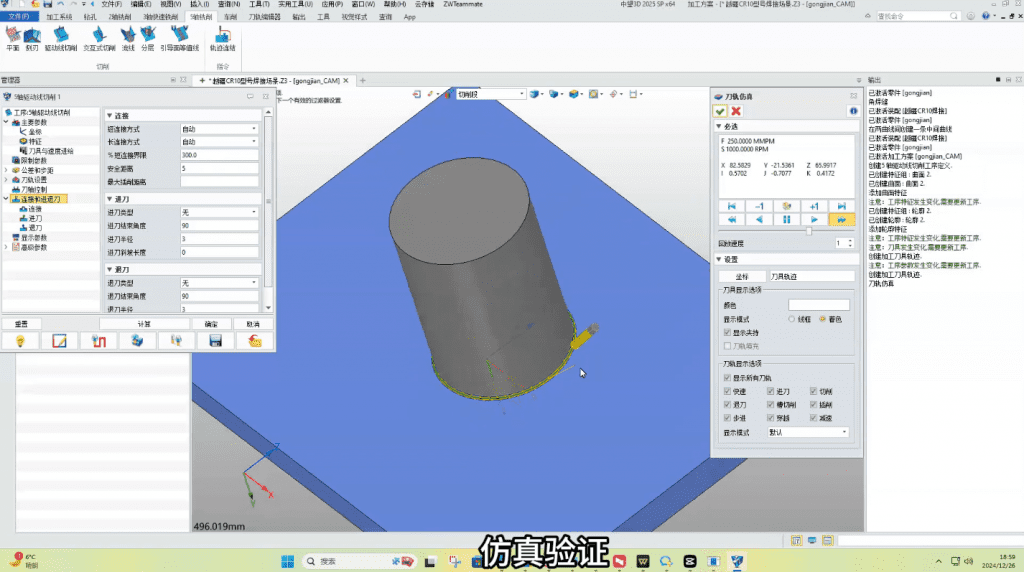
3.Com o módulo de soldadura, pode marcar rapidamente a posição da soldadura e gerar programas de recursos de soldadura.
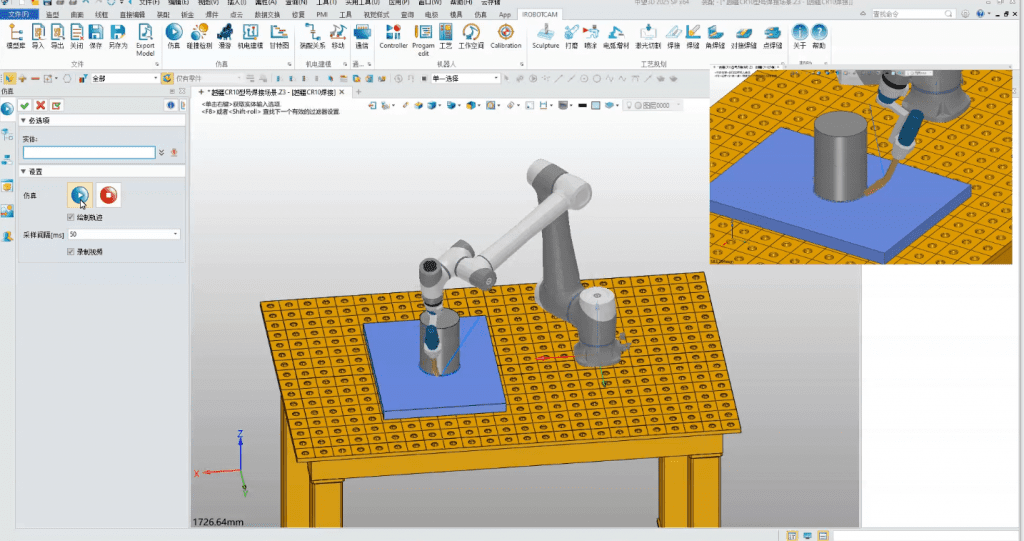
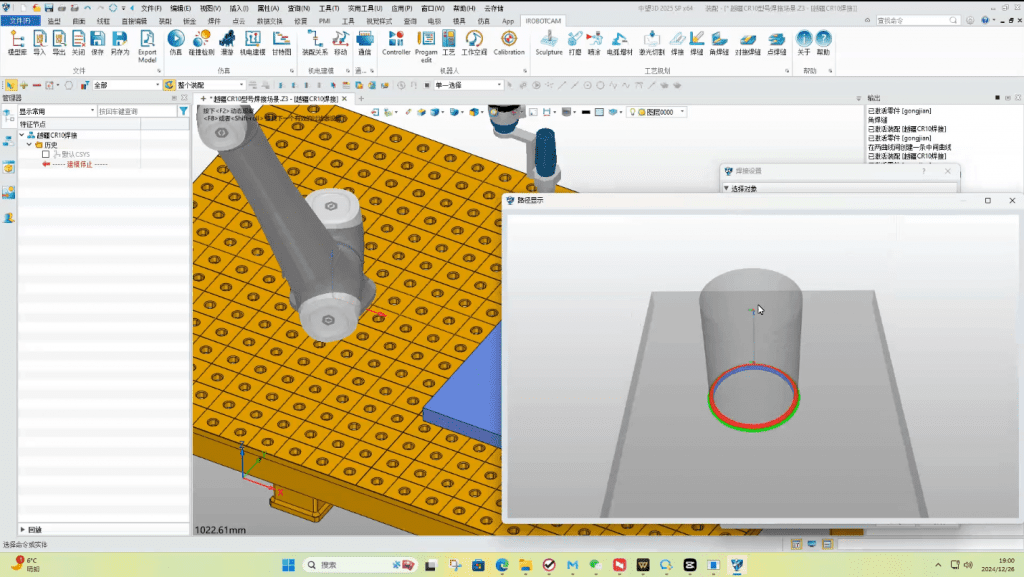
4.Com as capacidades avançadas de trajetória de dois a cinco eixos do iRobotCAM, pode gerar rapidamente trajetórias de programação de soldadura e simular as trajetórias.
5 Utilizando o efeito de processamento de simulação do robô do iRobotCAM, o efeito de soldadura do robô pode ser verificado e ainda mais simulado.
6. Para cenários de aplicação de robôs, o iRobotCAM pode ser utilizado para simular a cena geral de soldadura do robô e visualizar intuitivamente o processo de soldadura.
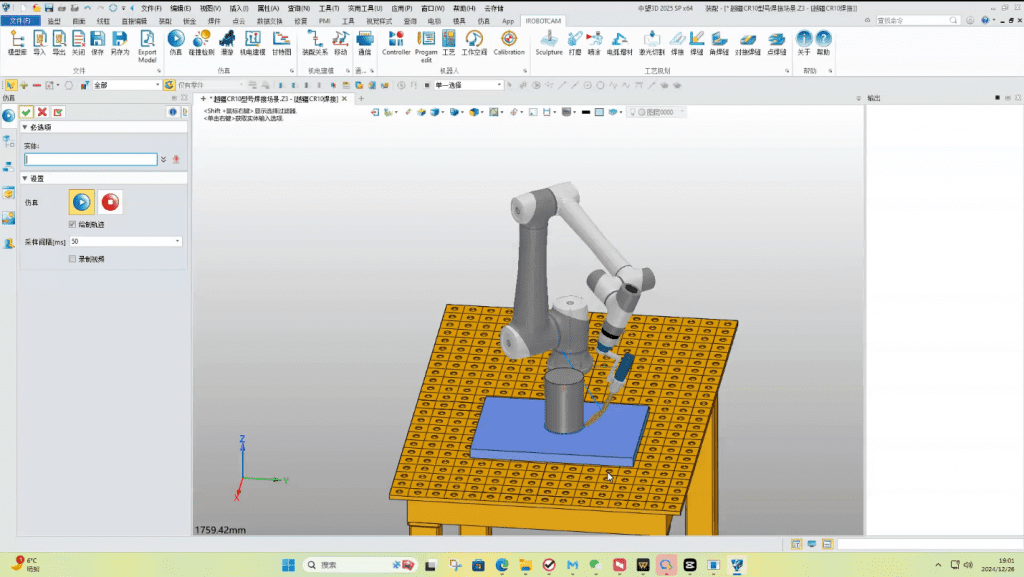
A seguir, um vídeo que mostra a programação e simulação de soldadura utilizando o robô colaborativo debot.
Sobre a Yueqing Technology
A Yueqing Technology está empenhada em construir uma plataforma aberta de programação offline de robôs iRobotCAM, que é uma solução digital que integra o design conceptual eletromecânico de linhas de produção, a simulação de programação de processamento de robôs e a depuração virtual.
Site da iRobotCAM: www.iRobotCAM.com; Contacto: cooperation@iRobotCAM.com


