Resumen: Con el objetivo de aplicar escenarios de automatización de unidades de material de robots, iRobotCAM, un software de programación fuera de línea de robots domésticos desarrollado por YueQing Technology, proporciona un módulo de diseño de unidades de material conveniente, que puede establecer rápidamente comunicación con el PLC y realizar la automatización según las necesidades de las unidades de material.
Como base para el diseño y la depuración de la simulación de una línea de producción robótica, la unidad de producción de materiales ha derivado métodos de diseño para diversos componentes de forma práctica. Volviendo al origen, desde la perspectiva del flujo de materiales general, el proceso de la mayoría de los escenarios básicos de materiales es similar al siguiente modo:
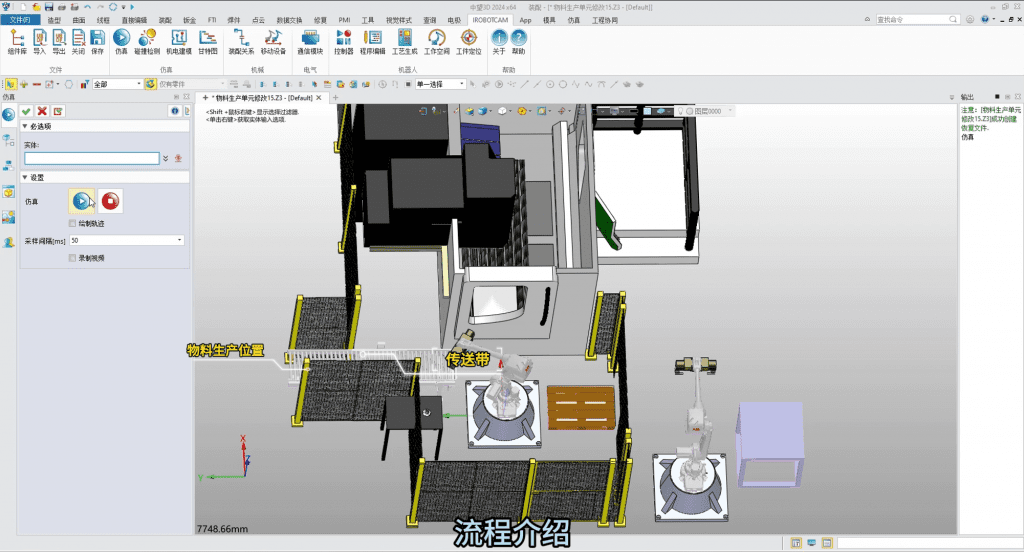
- En la escena, la entrada de la cinta transportadora produce materiales, transporta materiales hasta el final, detecta los materiales al final y la cinta transportadora deja de funcionar.
- El robot en el área de carga obtiene la señal para sujetar el material a la máquina herramienta para su procesamiento y carga, y finalmente lo coloca en la placa transportadora para su transporte.
- El robot en el área de descarga espera a que la placa transportadora transporte el material hacia afuera y, después de obtener la señal, sujeta el material a la mesa de colocación de material.
- La entrada de la cinta transportadora continúa produciendo materiales y el robot entra en el ciclo de carga y descarga.
El diseño de funciones es muy práctico. La unidad de materiales puede generar automáticamente materiales para diversas líneas de producción. La ventana de funciones de la unidad de producción de materiales se establece incorporando objetos de producción, ubicaciones de producción y frecuencias de producción.
Su capacidad de expansión de funciones es notable. Diseñado específicamente para los requisitos de la unidad de material, el potente motor físico de iRobotCAM puede satisfacer las demandas de la simulación de movimiento multirrobot, incluso en escenarios complejos.
Tomemos como ejemplo la aplicación de carga y descarga de robots. iRobotCAM puede implementar rápidamente los siguientes diseños:
Primero, se importa el modelo del robot a la escena desde la biblioteca de componentes y se ensambla al robot configurando las herramientas por separado.
Segundo, el software permite añadir marcadores mediante la función de arrastrar y soltar, junto con las instrucciones del programa del robot, controlando así la ejecución de las funciones de carga y descarga.
Finalmente, se pueden añadir varios robots a la escena, y el controlador multirrobot gestiona las instrucciones del programa para realizar las funciones de carga y descarga respectivamente.
Como unidad de producción de material, exploraremos más a fondo cómo iRobotCAM logra de forma conveniente la automatización de la unidad de material del robot a través del siguiente vídeo.
Acerca de Yueqing Technology
Yueqing Technology se ha comprometido a construir una plataforma abierta de programación fuera de línea de robots iRobotCAM, que es una solución digital que integra el diseño conceptual electromecánico de líneas de producción, la simulación de programación de procesamiento de robots y la depuración virtual.
Sitio web de iRobotCAM: www.iRobotCAM.com; Contacto: Cooperation@iRobotCAM.com


