Resumo: Visando cenários de aplicação de automatização de unidades de material de robôs, o iRobotCAM, um software de programação offline de robôs domésticos desenvolvido pela YueQing Technology, fornece um módulo de design de unidade de material conveniente, que pode estabelecer comunicação rapidamente com o PLC e realizar a automatização de acordo com as necessidades das unidades de material.
Como base para o projeto e a depuração da simulação de uma linha de produção de robôs, a unidade de produção de materiais derivou métodos de projeto para vários componentes diferentes de uma forma conveniente. Voltando à fonte, na perspectiva do fluxo geral de materiais, o processo da maioria dos cenários básicos de materiais é semelhante ao seguinte modo:
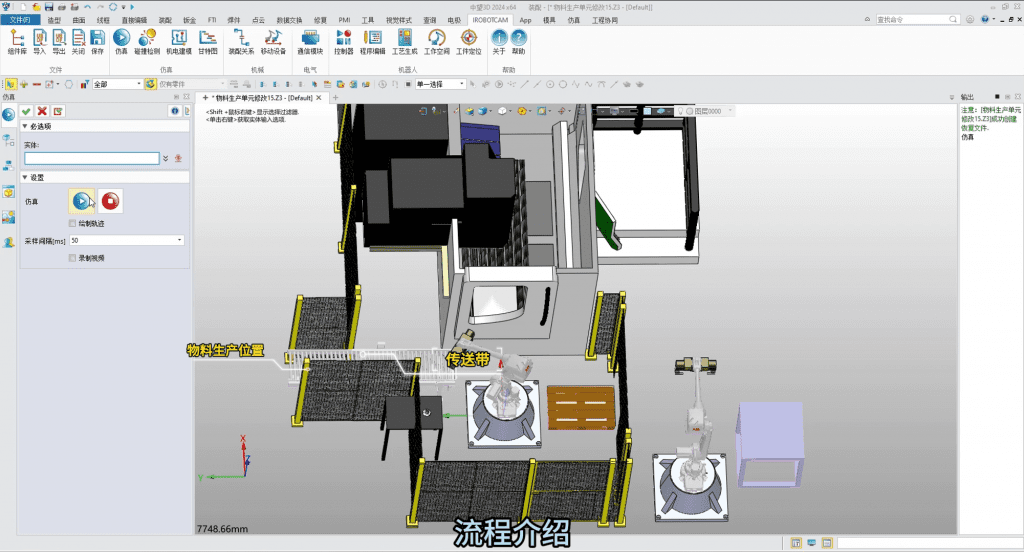
- Na cena, a entrada da correia transportadora produz materiais, transporta os materiais até ao fim, deteta os materiais no final e a correia transportadora deixa de funcionar.
- O robô na área de carregamento obtém o sinal para prender o material à máquina-ferramenta para processamento e carregamento e, por fim, coloca-o na placa transportadora para transporte.
- O robô na zona de descarga aguarda que a placa transportadora transporte o material para o exterior e, após obter o sinal, fixa o material à mesa de posicionamento de material.
- A entrada da correia transportadora continua a produzir materiais, e o robô entra no ciclo de carga e descarga.
O design da função é altamente conveniente. A unidade de material é capaz de gerar automaticamente materiais para várias linhas de produção. A janela de função da unidade de produção de material é estabelecida pela incorporação de objetos de produção, locais de produção e frequências de produção.
A sua capacidade de expansão de funções é notável. Adaptado especificamente aos requisitos da unidade de material, o poderoso motor físico do iRobotCAM pode satisfazer as exigências de simulação de movimento de vários robôs, mesmo em cenários mais complexos.
Tomemos como exemplo a aplicação de carga e descarga de robôs. O iRobotCAM pode implementar prontamente os seguintes projetos: em
primeiro lugar, importar o modelo do robô para a cena a partir da biblioteca de componentes e montá-lo no robô configurando separadamente as ferramentas do robô.
Em segundo lugar, o software permite a adição de marcadores através do ensino de arrastar e largar, juntamente com a adição de instruções do programa do robô, controlando assim o programa do robô para executar as funções de carga e descarga.
Por fim, podem ser adicionados vários robôs à cena, e as instruções do programa do robô são geridas pelo controlador multirrobô para executar as funções da área de carga e descarga, respetivamente.
Como unidade de produção de materiais, iremos explorar mais detalhadamente como o iRobotCAM realiza convenientemente a automatização da unidade de materiais do robô através do vídeo seguinte.
Sobre a Yueqing Technology
A Yueqing Technology está empenhada em construir uma plataforma aberta de programação offline de robôs iRobotCAM, que é uma solução digital que integra o design conceptual eletromecânico de linhas de produção, a simulação de programação de processamento de robôs e a depuração virtual.
Site da iRobotCAM: www.iRobotCAM.com; Contacto: cooperation@iRobotCAM.com


