概要:協働ロボットの活用は、膨大な反復手作業の負担を軽減し、生産効率を大幅に向上させます。様々なロボット協働アプリケーションの基礎は、ロボットプログラミングとシミュレーションにあります。家庭用ロボットオフラインプログラミングソフトウェアiRobotCAMを使用することで、Yuejiangなどの協働ロボットを用いて、ロボットプログラミングと仮想シミュレーションを迅速に実現できます。
ロボットアプリケーションの柔軟性、特に協働ロボットの高自由度・高精度化に伴い、航空、自動車、エレクトロニクスなどの業界では、反復的な手作業から解放され、生産効率を大幅に向上させるために、多数の協働ロボットが導入されています。様々なロボット協働シナリオのプログラミングとシミュレーションは、協働ロボットアプリケーションの基礎です。本稿では、3D CADモデリングプラットフォームに基づいて開発された家庭用ロボットオフラインプログラミングソフトウェアであるiRobotCAMを紹介し、Debot協働ロボットを例に、Debot協働ロボットを使用してロボット溶接プログラミングと仮想シミュレーションを迅速に実現する方法を紹介します。
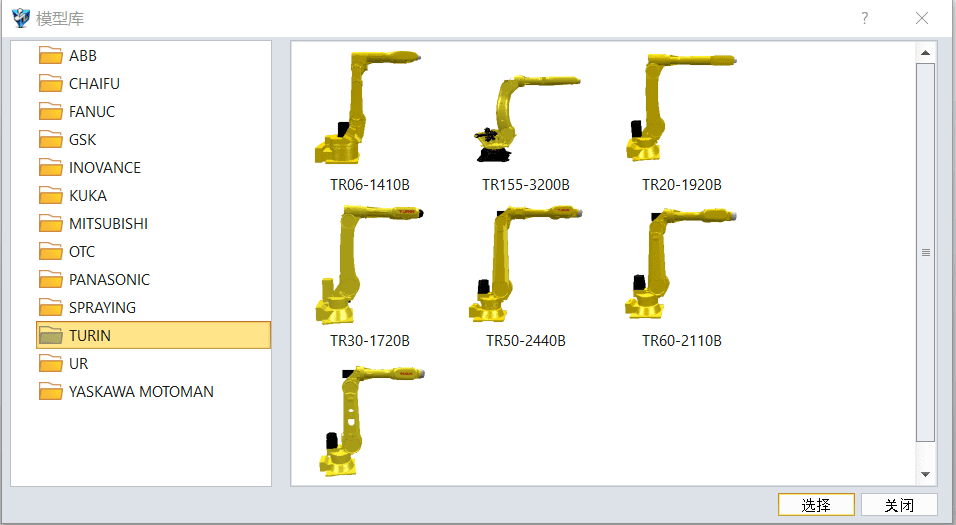
- iRobotCAMのロボットライブラリを使用すると、ABB、ZF、FANUC、Guangzhou CNC、Inovance、KUKA、Mitsubishi、Panasonic、Zhihui、Turin、UR、Yaskawaなどの既存のロボットライブラリを利用できるほか、必要に応じてdebot Roboticsなどの新しい協働ロボットライブラリを迅速に作成できます。ライブラリは、簡単なジョイント定義で構築できます。
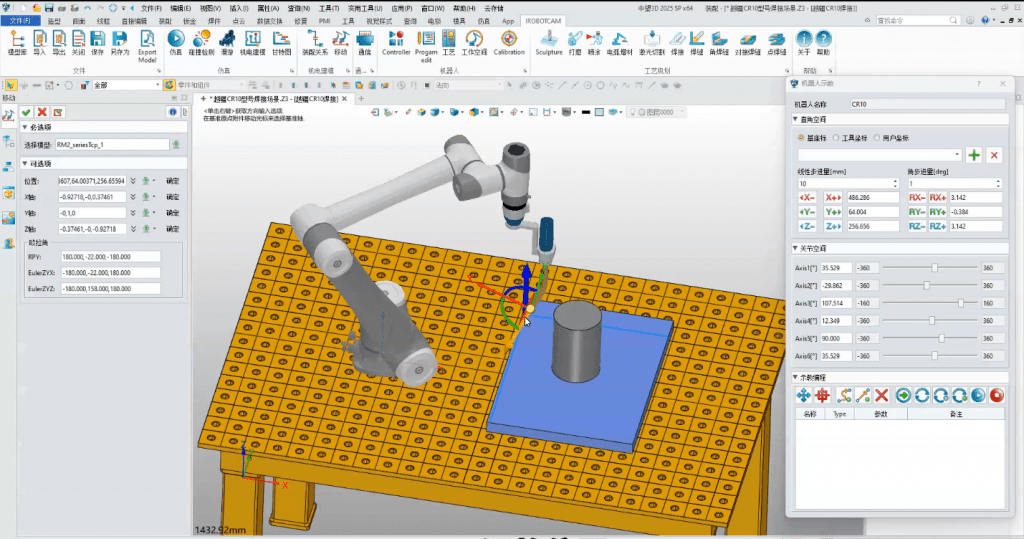
2. iRobotCAMの便利なティーチング機能を使用して、ドラッグアンドドロップだけでティーチングプログラミングを実現します。
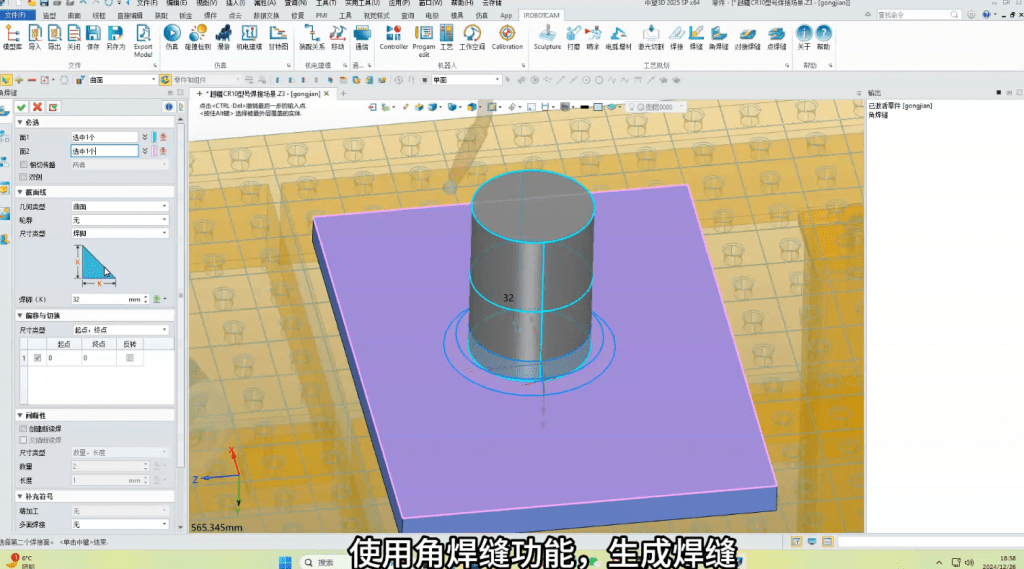
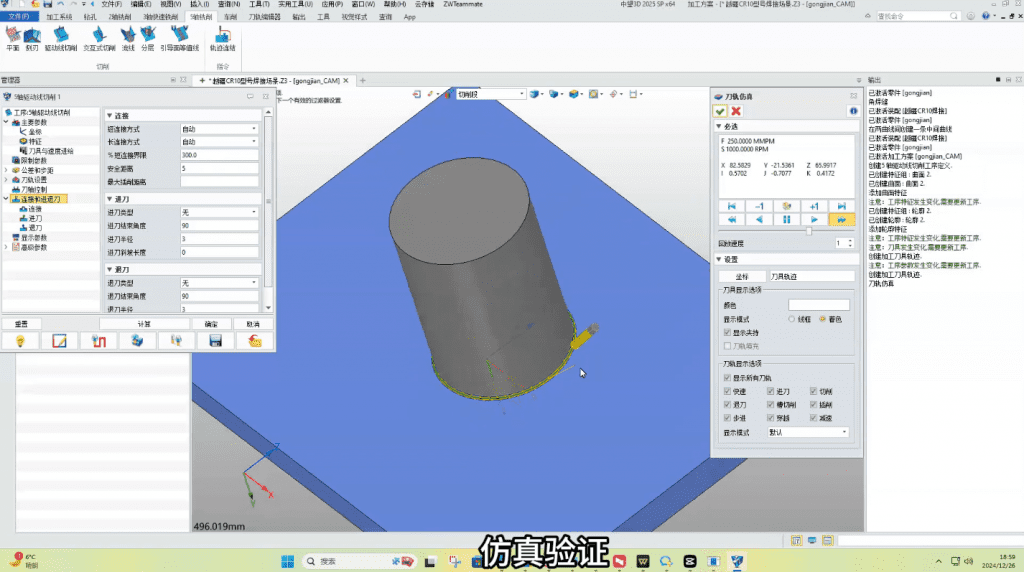
3. 溶接モジュールを使用すると、溶接位置をすばやくマークし、溶接機能プログラムを生成できます。
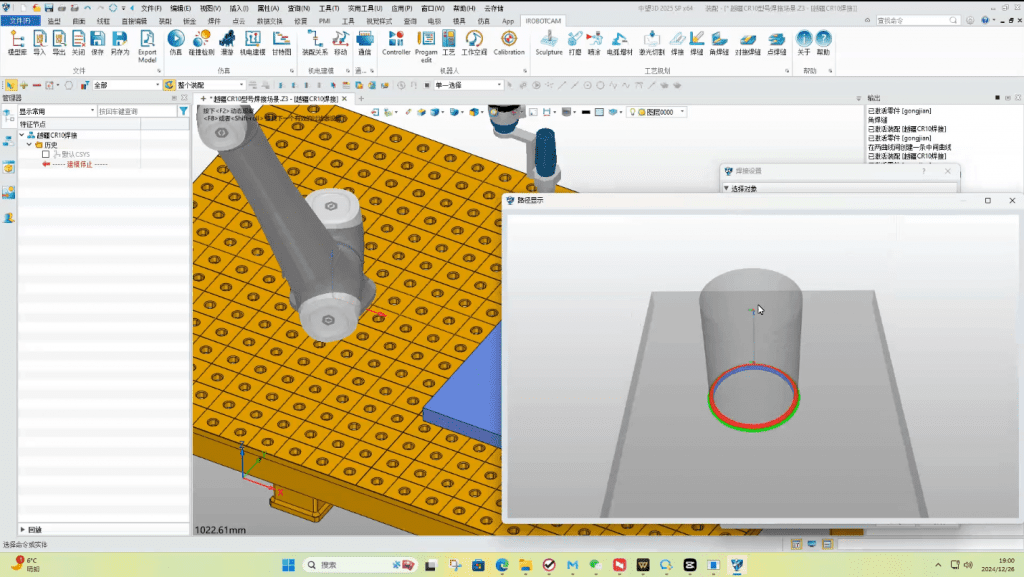
4. iRobotCAM の豊富な 2 ~ 5 軸の軌跡機能を使用すると、溶接プログラミングの軌跡をすばやく生成し、軌跡をシミュレートできます。
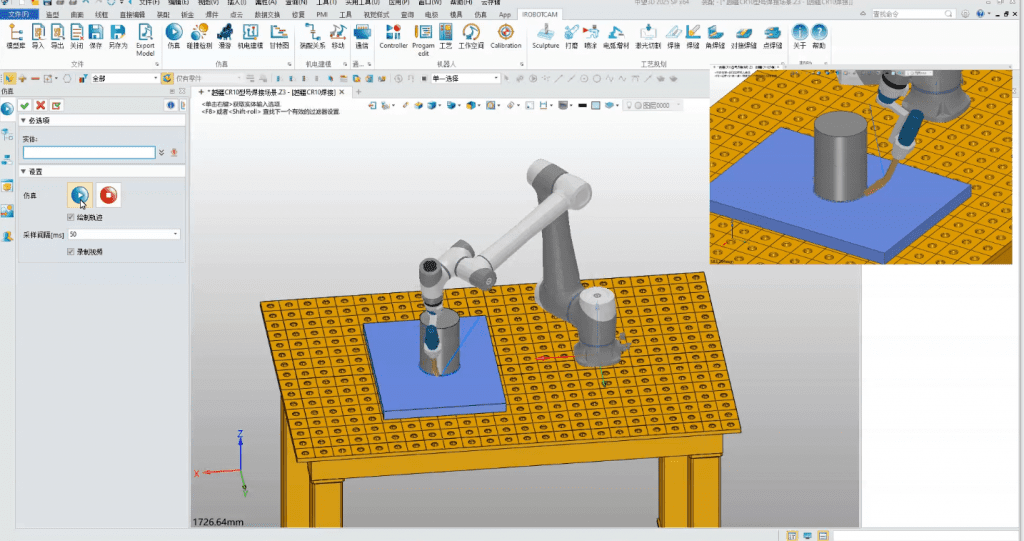
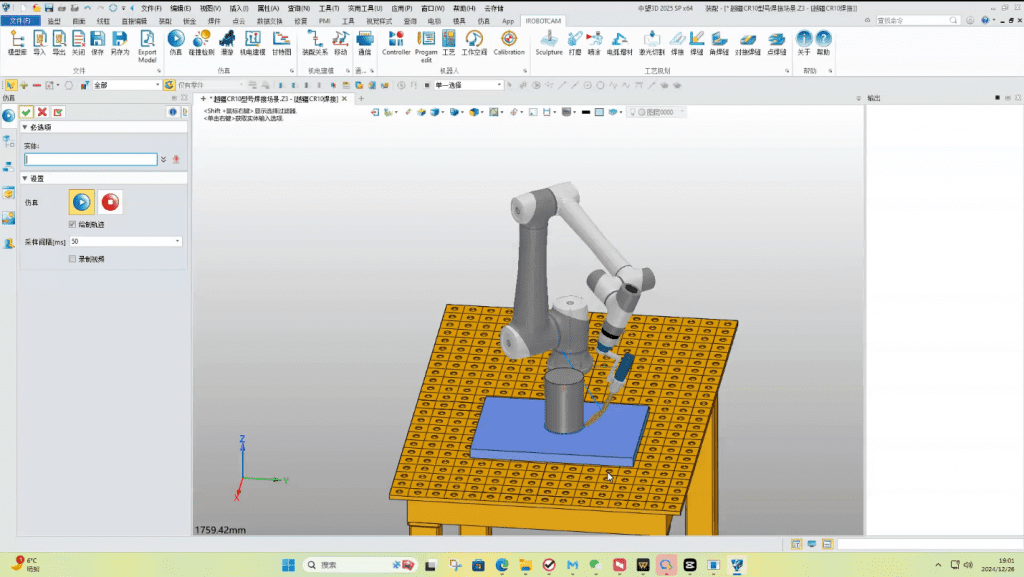
5 iRobotCAM のロボットシミュレーション処理効果を使用すると、ロボット溶接効果をさらに検証およびシミュレーションできます。
6. ロボットアプリケーションのシナリオでは、iRobotCAM を使用してロボットの全体的な溶接シーンをシミュレートし、溶接プロセスを直感的に表示できます。
以下は、デボット協働ロボットを使用した溶接のプログラミングとシミュレーションを示すビデオです。
Yueqing Technologyについて
Yueqing Technology は、生産ラインの電気機械概念設計、ロボット処理プログラミングシミュレーション、仮想デバッグを統合したデジタルソリューションであるオープンな iRobotCAM ロボット オフライン プログラミング プラットフォームの構築に取り組んでいます。
iRobotCAM ウェブサイト: www.iRobotCAM.com;


