Özet: İşbirlikçi robotların uygulanması, büyük miktarda tekrarlayan manuel işi serbest bırakmaya ve üretim verimliliğini büyük ölçüde iyileştirmeye yardımcı olur. Çeşitli robot işbirlikçi uygulamalarının temeli, robot programlama ve simülasyonunda yatar. Ev tipi robot çevrimdışı programlama yazılımı iRobotCAM aracılığıyla, Yuejiang gibi işbirlikçi robotlar, robot programlama ve sanal simülasyonu gerçekleştirmek için hızla kullanılabilir.
Robot uygulamalarının artan esnekliği, özellikle işbirlikçi robotların yüksek serbestlik derecesi ve yüksek hassasiyetiyle, havacılık, otomobil ve elektronik gibi endüstriler tekrarlayan manuel işleri serbest bırakmak ve üretim verimliliğini büyük ölçüde artırmak için çok sayıda işbirlikçi robot benimsedi. Çeşitli robot işbirlikçi senaryolarının programlanması ve simülasyonu, işbirlikçi robot uygulamalarının temelini oluşturur. Bu makale, 3B CAD modelleme platformuna dayalı olarak geliştirilen bir ev robotu çevrimdışı programlama yazılımı olan iRobotCAM’i tanıtacak ve robot kaynak programlama ve sanal simülasyonu gerçekleştirmek için debot işbirlikçi robotlarını nasıl hızlı bir şekilde kullanacağınızı tanıtmak için debot işbirlikçi robotunu örnek alacaktır.
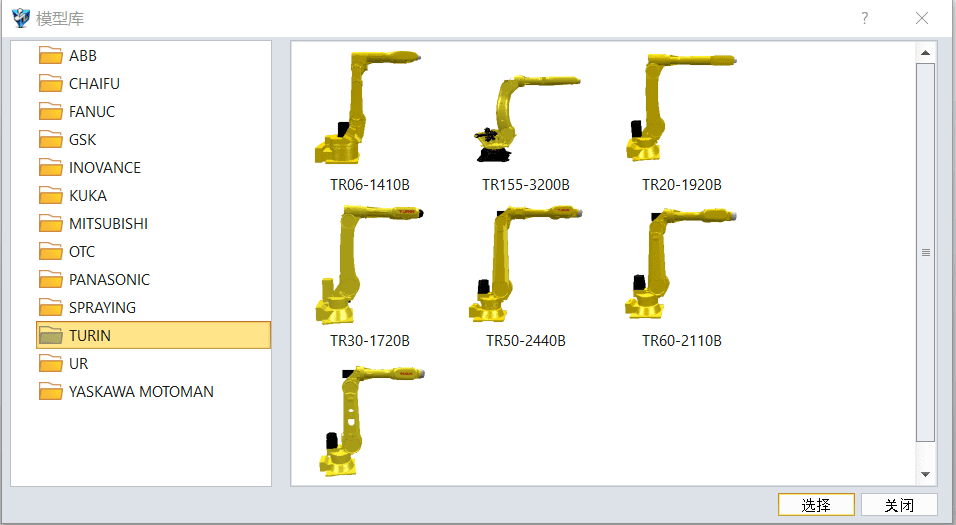
- iRobotCAM’in robot kütüphanesiyle mevcut ABB, ZF, FANUC, Guangzhou CNC, Inovance, Kuka, Mitsubishi, Panasonic, Zhihui, Turin, UR, Yaskawa ve diğer robot kütüphanelerini kullanabilir veya ihtiyaç duyduğunuzda debot Robotics gibi yeni işbirlikçi robot kütüphanelerini hızla oluşturabilirsiniz. Kütüphane basit ortak tanımlarla kurulabilir.
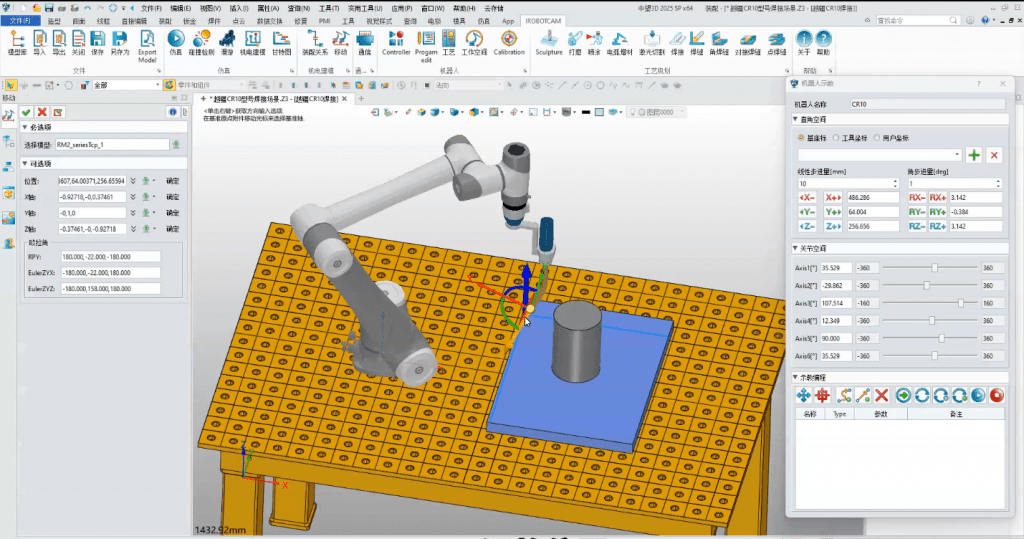
2. Öğretim programını sürükleyip bırakarak basitçe öğretmek için iRobotCAM’in kullanışlı öğretim işlevini kullanın
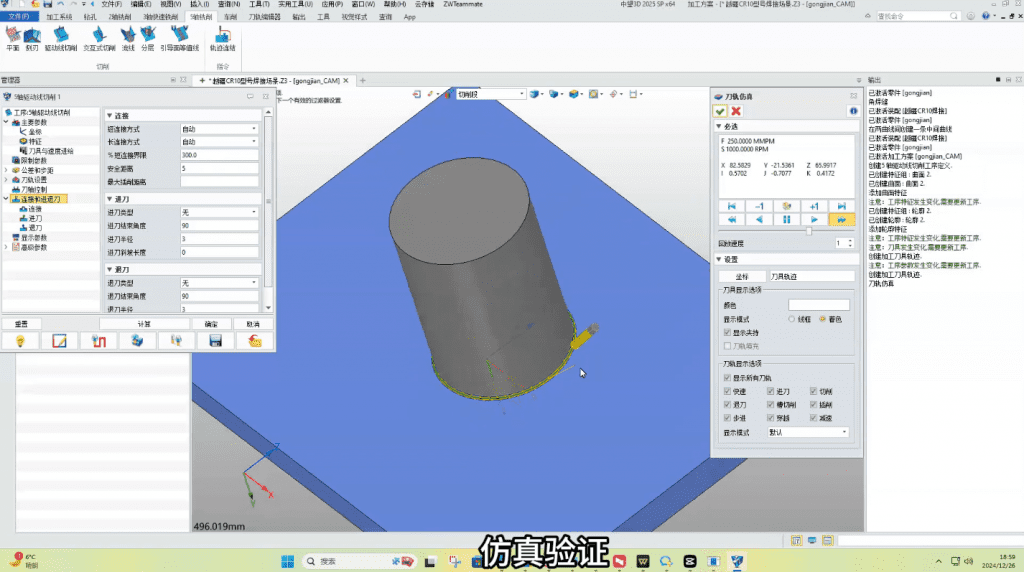
3. Kaynak modülünü kullanarak kaynak pozisyonunu hızlı bir şekilde işaretleyebilir ve kaynak özellik programları oluşturabilirsiniz.
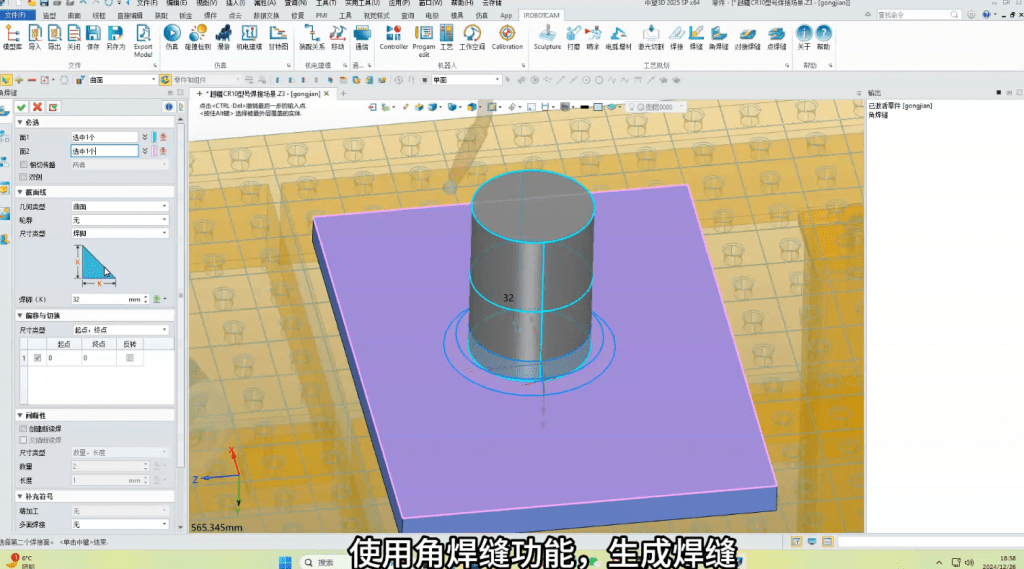
4. iRobotCAM’in zengin iki ila beş eksenli yörünge yeteneklerini kullanarak, kaynak programlama yörüngelerini hızlı bir şekilde oluşturabilir ve yörüngeleri simüle edebilirsiniz.
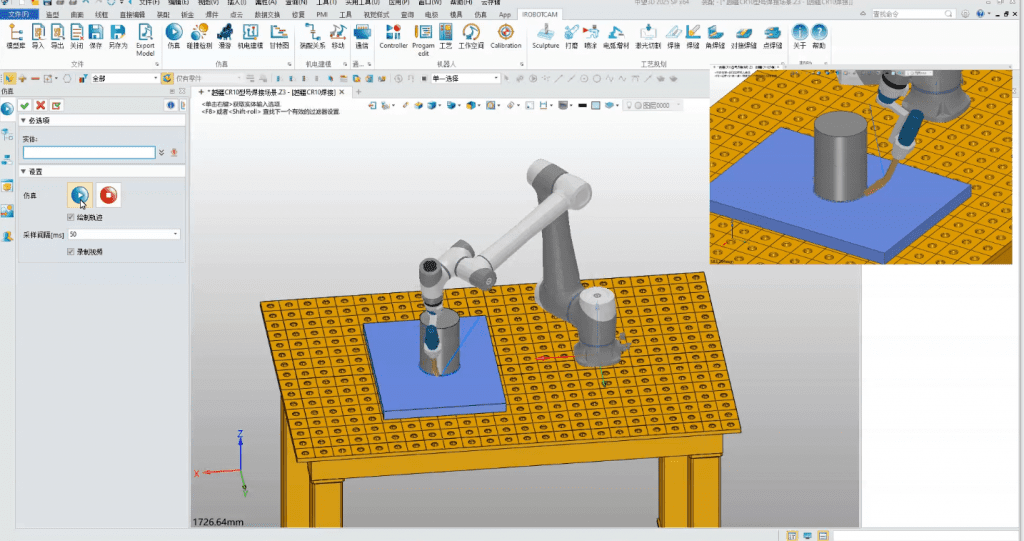
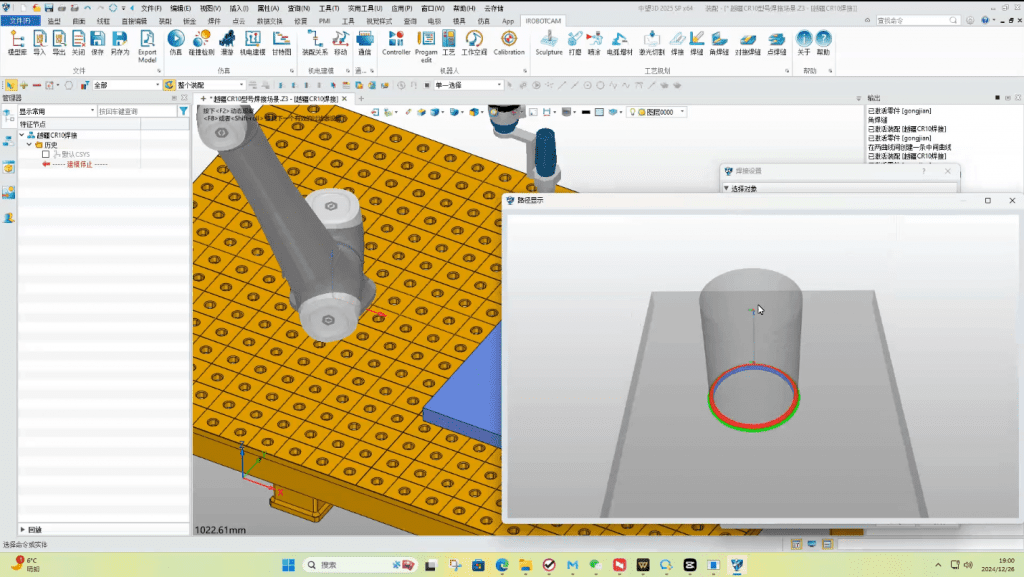
5 iRobotCAM’in robot simülasyon işleme efekti kullanılarak robot kaynak efekti daha ileri düzeyde doğrulanabilir ve simüle edilebilir.
6. Robot uygulama senaryoları için iRobotCAM, robotun genel kaynak sahnesini simüle etmek ve kaynak sürecini sezgisel olarak görüntülemek için kullanılabilir.
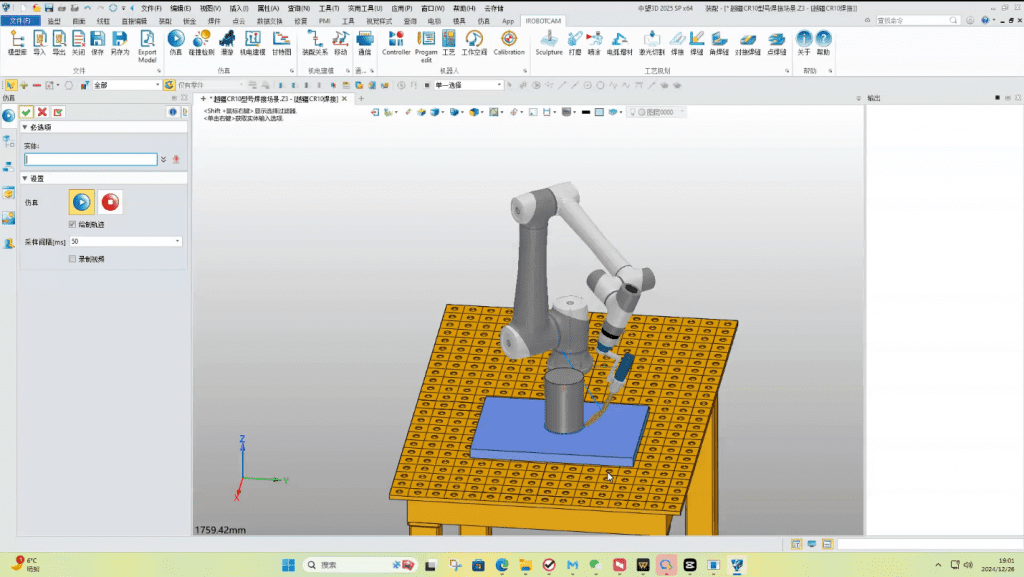
Aşağıda debot işbirlikçi robot kullanılarak kaynak işleminin programlanması ve simülasyonunu gösteren bir video yer almaktadır.
Yueqing Teknolojisi Hakkında
Yueqing Technology, üretim hatlarının elektromekanik kavramsal tasarımını, robot işleme programlama simülasyonunu ve sanal hata ayıklamayı birleştiren dijital bir çözüm olan açık bir iRobotCAM robot çevrimdışı programlama platformu oluşturmaya kendini adamıştır.
iRobotCAM web sitesi: www.iRobotCAM.com


