Resumen: La dificultad del procesamiento de revestimiento láser robótico para el procesamiento de piezas complejas como cuchillas radica en la utilización de características de alta precisión, y las ventajas de la arquitectura técnica de iRobotCAM basada en el núcleo CAD 3D pueden cumplir de manera efectiva los requisitos de alta precisión, a fin de realizar un procesamiento de revestimiento láser de alta precisión de cuchillas de cinco ejes.
El diseño y procesamiento de las palas debe adaptarse a escenarios específicos según los diferentes escenarios de aplicación, desde pequeñas palas de ventilador hasta palas de aviación. Según los diferentes escenarios de aplicación de los productos industriales, los elementos de diseño son diferentes: algunos requieren una estética, otros un silencio, otros un rendimiento. Si la pala finalmente satisface las necesidades, implica las necesidades de diferentes industrias y los requisitos de diferentes métodos de proceso. El núcleo es el control de la precisión, solo la exactitud se controla efectivamente. Hay una manera de satisfacer las necesidades de diferentes escenarios. Tomando como ejemplo el procesamiento robótico de revestimiento láser de palas, iRobotCAM aprovecha su arquitectura basada en CAD y tiene las ventajas de la arquitectura de alta precisión. ¿Cómo aplicarlo efectivamente al procesamiento de revestimiento láser?
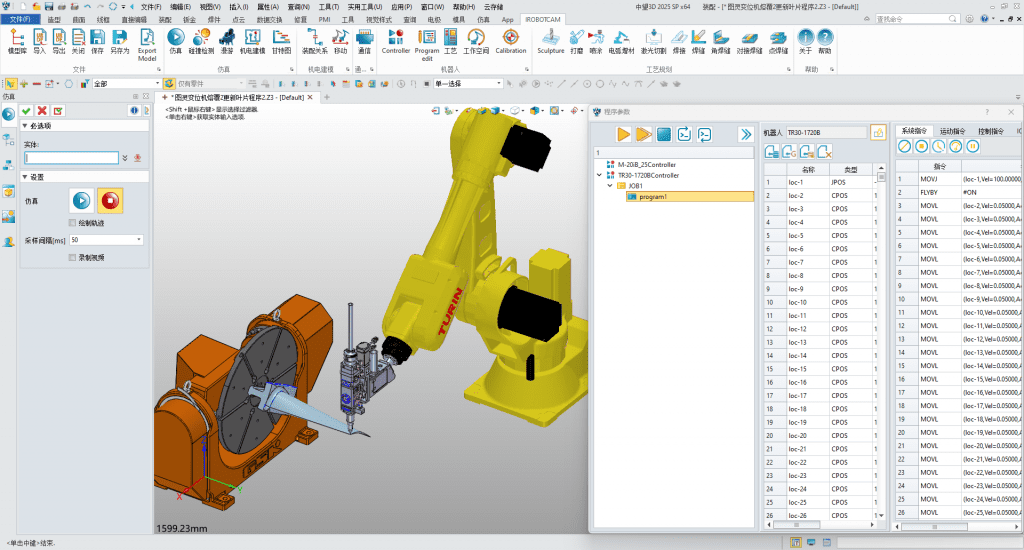
Para aplicaciones de procesamiento láser robótico, el proceso habitual es el siguiente:
Importar robot y pieza de trabajo > posicionamiento de la pieza de trabajo y calibración del robot > realizar programación de trayectoria > simulación de todas las escenas > salida de código y procesamiento del robot
- Utilizando las características de iRobotCAM basado en la plataforma CAD 3D y mirando en 3D, puede establecer rápidamente un modelo digital del escenario de aplicación del robot.
- Utilizando el módulo electromecánico de iRobotCAM y la biblioteca de robots preestablecidos, puede definir robots, herramientas, etc. relevantes para la escena del robot.
- Según las necesidades del proceso de procesamiento láser, se generan varias trayectorias de 2 a 5 ejes para satisfacer los requisitos de trayectoria de escenarios específicos.
- Basado en el motor de física de iRobotCAM, se simula el movimiento del robot, se calibra y se emite el código de ejecución correspondiente.
Además de la arquitectura técnica, la percepción más directa del usuario es la facilidad de programación del software del robot, y la experiencia de usuario es uno de los indicadores clave. Francamente, el progreso del software industrial no es tarea fácil, pero desde la arquitectura técnica hasta la experiencia de usuario, el software industrial nacional ha avanzado mucho en los últimos años. Con tantos años de experiencia en software extranjero, también puede probar el software industrial nacional. Si busca software de programación fuera de línea para robots, le recomendamos iRobotCAM.
Tomando como ejemplo el uso del robot de Turín para realizar el procesamiento de revestimiento láser de palas de cinco ejes, ¿cómo iRobotCAM realiza fácilmente el procesamiento láser del robot paso a paso?
Acerca de Yueqing Technology
Yueqing Technology se ha comprometido a construir una plataforma abierta de programación fuera de línea de robots iRobotCAM, que es una solución digital que integra el diseño conceptual electromecánico de líneas de producción, la simulación de programación de procesamiento de robots y la depuración virtual.
Sitio web de iRobotCAM: www.iRobotCAM.com, contacto: Cooperation@iRobotCAM.com


