Resumo: A dificuldade do processamento de revestimento a laser por robôs para o processamento de peças complexas, como lâminas, reside na utilização de características de alta precisão, e as vantagens da arquitetura técnica do iRobotCAM baseada no kernel CAD 3D podem satisfazer eficazmente os requisitos de alta precisão, de modo a realizar o processamento de revestimento a laser de alta precisão de lâminas de cinco eixos.
O design e o processamento das pás precisam de ser adaptados a cenários específicos de acordo com diferentes cenários de aplicação, desde pequenas pás de ventilador até pás de aviação, de acordo com os diferentes cenários de aplicação de produtos industriais, os elementos de design são diferentes, alguns exigem orientação para a beleza, alguns exigem base no silêncio, alguns exigem base no desempenho, e se a pá finalmente satisfaz as necessidades envolve as necessidades de diferentes indústrias, bem como os requisitos de diferentes métodos de processo, o núcleo é o controlo da precisão, apenas a exatidão é controlada de forma eficaz, existe uma forma de satisfazer às necessidades dos diferentes cenários. Tomando como exemplo o processamento robótico de revestimento laser de lâminas, o iRobotCAM tira partido da sua arquitetura baseada em CAD e tem as vantagens da arquitetura de alta precisão. Como aplicá-lo eficazmente ao processamento de revestimento a laser?
Para aplicações de processamento robótico a laser, o processo usual é o seguinte:
Importar robô e peça de trabalho > Posicionamento da peça de trabalho e calibração do robô > Realizar programação de trajetórias > Simulação de todas as cenas > Saída de código e processamento do robô
- Utilizando as características do iRobotCAM baseado na plataforma CAD 3D e visualizando em 3D, pode estabelecer rapidamente um modelo digital do cenário de aplicação do robô
- Utilizando o módulo eletromecânico do iRobotCAM e a biblioteca de robôs predefinida, pode definir robôs, ferramentas, etc. relevantes para a cena do robô
- De acordo com as necessidades do processo de processamento a laser, são geradas várias trajetórias de 2 a 5 eixos para satisfazer os requisitos de trajetória de cenários específicos
- Com base no motor de física do iRobotCAM, o movimento do robô é simulado, calibrado e o código de execução correspondente é gerado.
Além da arquitetura técnica, a perceção mais direta do utilizador é a facilidade de programação do software do robô, e a experiência do utilizador é um dos principais indicadores. Falando francamente, o progresso do software industrial não é um trabalho de um dia, mas da arquitetura técnica à experiência do utilizador, o software industrial nacional fez um grande progresso nos últimos anos, com tantos anos de software estrangeiro, pode muito bem tentar o software industrial nacional, para a escolha do software de programação offline de robôs, pode muito bem tentar o iRobotCAM.
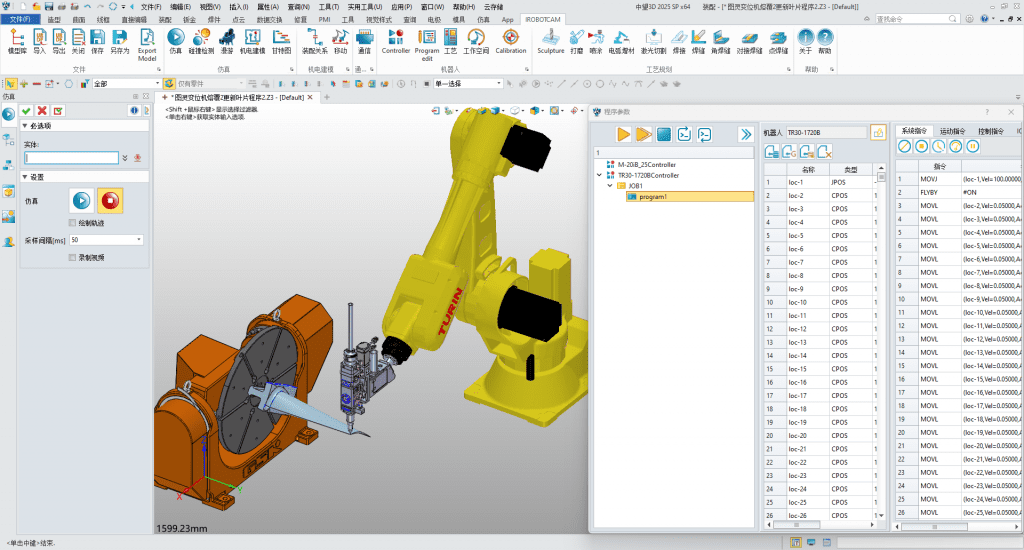
Tomando como exemplo a utilização do robô de Turim para realizar o processamento de revestimento a laser de lâminas de cinco eixos, como é que o iRobotCAM realiza facilmente o processamento a laser do robô passo a passo?
Sobre a Yueqing Technology
A Yueqing Technology está empenhada em construir uma plataforma aberta de programação offline de robôs iRobotCAM, que é uma solução digital que integra o design conceptual eletromecânico de linhas de produção, a simulação de programação de processamento de robôs e a depuração virtual.
Site da iRobotCAM: www.iRobotCAM.com, contacto: cooperation@iRobotCAM.com


