概要:焊接在工业机器人应用包括点焊,弧焊等类型,从单点焊接到装配焊接,复杂度日益提升,单纯依赖于手工的示教已经不满足日常需求,特别是对于装配焊接更是如此。而作为全国产的机器人离线编程与虚拟调试软件,iRobotCAM是如何考虑焊接工艺的应用呢。
焊接在工业机器人应用包括点焊,弧焊等类型,从单点焊接到装配焊接,复杂度日益提升,单纯依赖于手工的示教已经不满足日常需求,特别是对于装配焊接更是如此,特别是在类似于搅拌摩擦焊等复杂应用中,涉及到材料学,工艺学,机器人运动学等综合应用,对于机器人编程与仿真软件的要求更高。本文以装配焊接为例,展示全国产机器人离线编程与仿真软件iRobotCAM在焊接工艺应用上的产品能力及思考。
作为装配焊接的工艺应用而言,主要的难度在于:
- 焊接的工艺类型较多,难以快速匹配。工艺的应用的核心是背后需要根据焊接材料的特性匹配对应的机器人工艺应用,尤其以搅拌摩擦焊接为代表,需要根据具体的产品需求来开发焊接工艺,以满足产品需求。
- 焊接的编程学习成本高。现有的焊接机器人的操作人员在精通机器人的使用的基础上,迫切需要编程更简单,目的在于快速提升编程的效率。
- 焊接的一体化流程不强。由于焊接涉及上下游的数据管理,难以统一上下游的焊接文件的管理与加工修正的管理。
针对装配焊接的工艺应用的的难点,在过去,由于过于依赖于工业机器人的本身集成的软件能力,大大受限了工业机器人在各类复杂的焊接场景中的应用。而随着离线编程软件的出现,工业机器人的复杂场景的焊接编程成为可能。作为国产机器人离线编程软件的代表,iRobotCAM是如何思考这一类复杂的应用场景的呢
- iRobotCAM的产品开发架构的工艺可扩展性强,利用iRobotCAM的工艺库中,不仅满足焊接的各类场景的应用需求,还提供便携的算法集成方法,可以快速的集成针对各类复杂焊接新应用场景的优化,实现编程与仿真一体化。
- iRobotCAM操作易用性极强。作为国产机器人离线编程软件与仿真软件,iRobotCAM基于中望3D三维CAD几何引擎开发,采用CAD软件的统一操作逻辑,可以快速实现编程与仿真,操作简便。更由于产品开发之初就重点考虑了易用性,iRobotCAM在全国职业院校技能大赛中获得了职业院校教程和学生的认可,在与广州数控等机器人厂商的合作中得到了厂商和用户的认可。
- iRobotCAM的一体化管理能力强。 利用iRobotCAM的三维CAD的基础,可以实现读取Solidworks, Creo, Catia,STEP, Parasolid等数据格式,而针对焊缝等几何特征能够做到自动提取,对于碰撞检测可以做到快速检测,建立焊接的数字孪生模型后,在上下游的交互中,能够快速的识别焊接的工艺需求意图,实现对于产品的焊接的一体化管理。
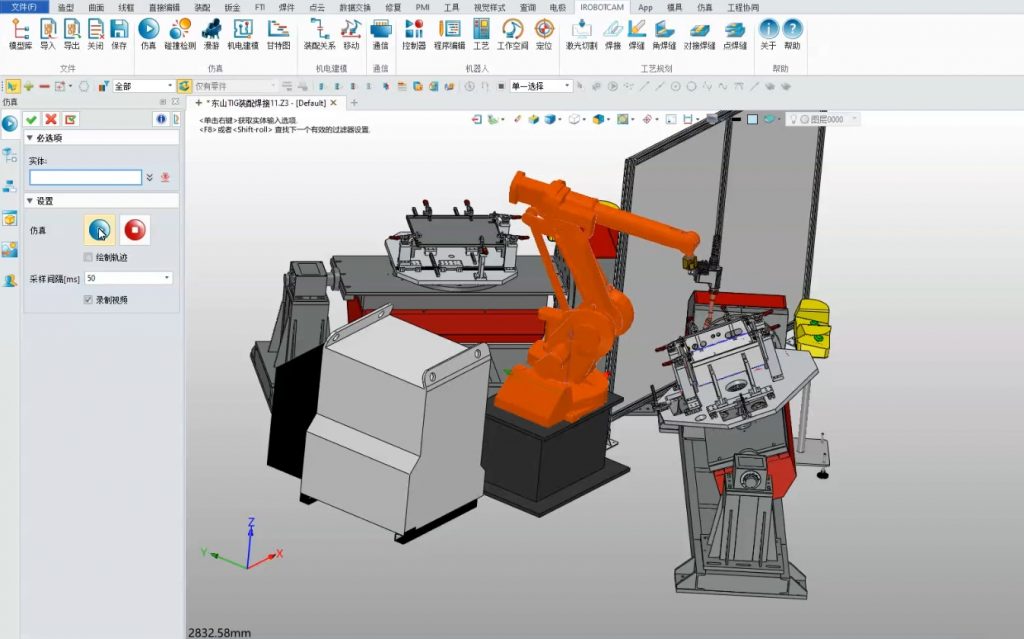
下面看一下利用iRobotCAM, 实现装配焊接的视频,了解iRobotCAM的装配焊接及仿真能力。
“iRobotCAM研发团队超过10年的机器人软件的研发与应用经验,正是基于对于未来国产机器人编程与仿真软件的发展的畅想,iRobotCAM在自身机器人工艺,机器人运动学的研发能力的基础上,基于国产的三维CAD几何内核平台上开发,充分利用三维几何的CAD能力,iRobotCAM实现了复杂的焊接工艺的极强的可扩展性能力。”
“iRobotCAM在产品架构研发初期,就充分了考虑了国内的复杂的工艺的应用场景,可以快速的增加针对性的工艺需求,实现既定的工艺需求,这也是iRobotCAM区别于众多的国外同类产品的核心优势,我们期望以国内的工业机器人的复杂焊接场景的需求为基础,充分的提升工业机器人应用边界,大幅提升工业机器人的应用效率。“ 这是iRobotCAM创始人团队对于iRobotCAM的产品定位,通过持续的产品创新与本土焊接应用的融合,让国产的机器人编程软件的能力服务好各种焊接应用的从业者。
关于越擎科技
越擎科技致力于打造开放的iRobotCAM机器人离线编程平台,是集产线机电概念设计以及机器人加工编程仿真,虚拟调试等一体的数字化解决方案.


