越擎科技
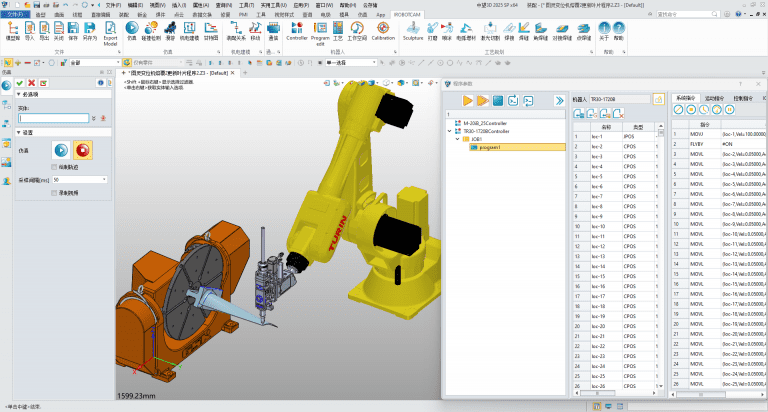
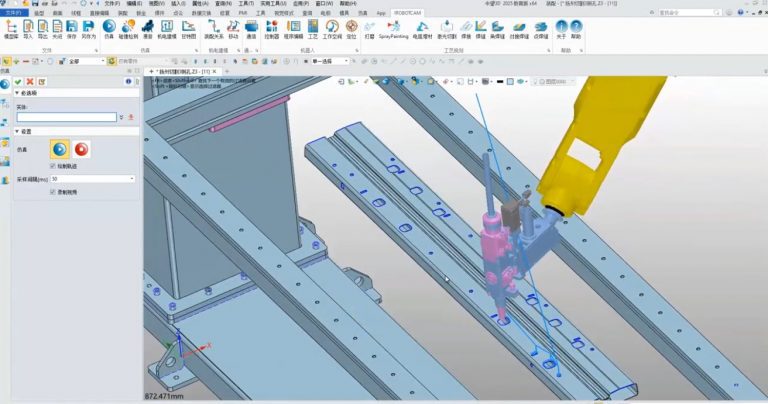
导入机器人及工件> 工件的定位与机器人标定>实现轨迹编程> 全场景的仿真> 代码输出及机器人加工
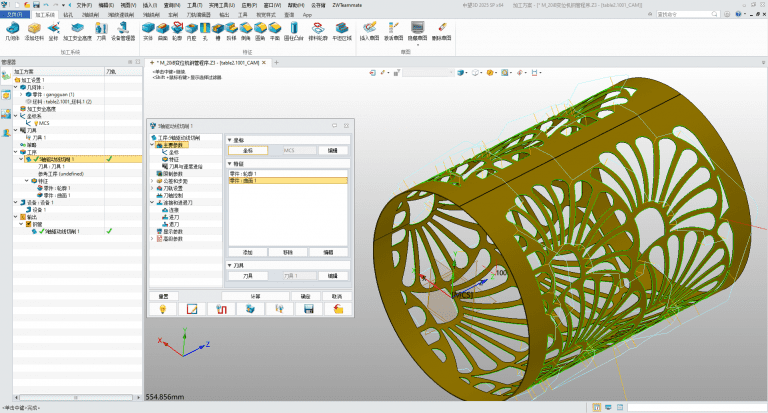
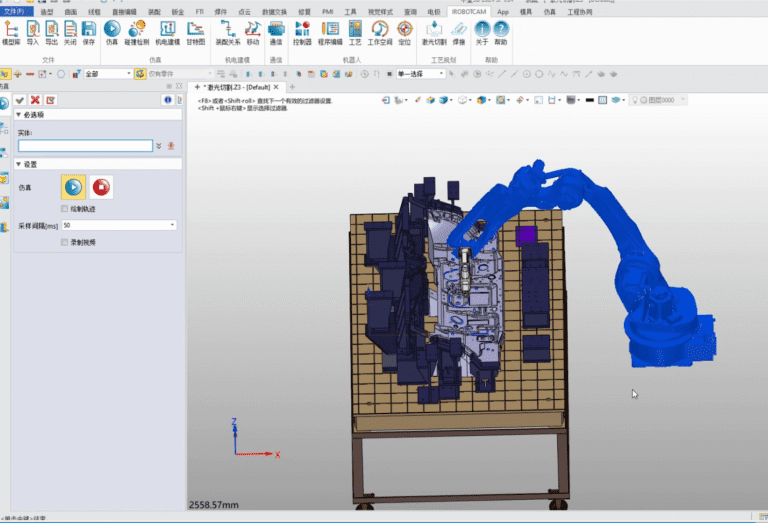
三维结构建模> 机电建模与运动仿真>轨迹生成与虚拟调试> 后置处理与加工仿真
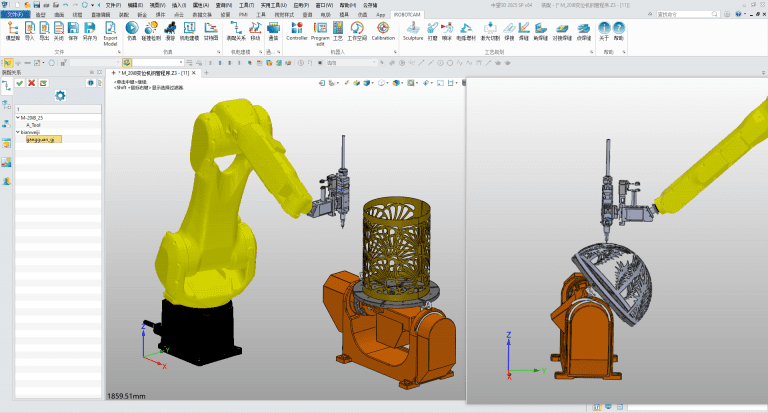
摘要: 机器人激光熔覆加工对于叶片等复杂的工件加工
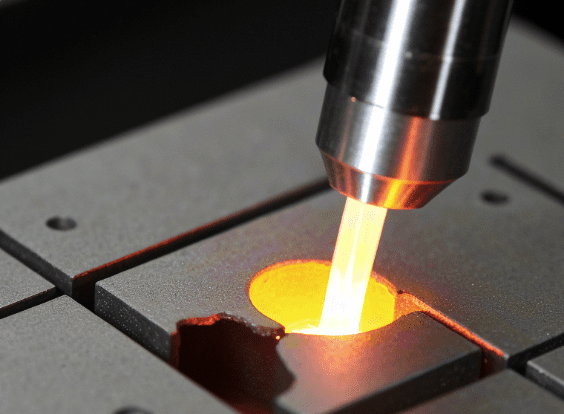
摘要:激光具备高精度的特性,而激光设备如何实现高精
概要:越擎科技发布激光加工编程与仿真技术白皮书,阐
概要:机器人激光的工艺主要在于高精度,而利用激光实
概要:扬州十牛自动化拥有丰富的机器人与智能自动化产
摘要:机器人激光加工的使用日益广泛,而快速实现机器