Streszczenie: Trudność obróbki napawania laserowego robota w celu obróbki złożonych przedmiotów obrabianych, takich jak łopatki, polega na wykorzystaniu cech o wysokiej precyzji, a zalety architektury technicznej iRobotCAM opartej na jądrze 3D CAD mogą skutecznie spełniać wymagania wysokiej precyzji, aby zrealizować obróbkę napawania laserowego o wysokiej precyzji łopatek pięcioosiowych.
Projektowanie i obróbka łopatek muszą być dostosowane do konkretnych scenariuszy zgodnie z różnymi scenariuszami zastosowań, od małych łopatek wentylatora po łopatki lotnicze, zgodnie z różnymi scenariuszami zastosowań produktów przemysłowych, elementy konstrukcyjne są różne, niektóre wymagają zorientowania na piękno, niektóre wymagają opartego na ciszy, niektóre wymagają opartego na wydajności, a to, czy łopatka ostatecznie spełnia potrzeby, wiąże się z potrzebami różnych branż, a także wymaganiami różnych metod przetwarzania, rdzeniem jest kontrola precyzji, tylko dokładność jest skutecznie kontrolowana, istnieje sposób na zaspokojenie potrzeb różnych scenariuszy. Biorąc za przykład robotyczną obróbkę napawania laserowego łopatek, iRobotCAM wykorzystuje architekturę opartą na systemie CAD i ma zalety architektury o wysokiej precyzji. Jak skutecznie zastosować ją do obróbki napawania laserowego?
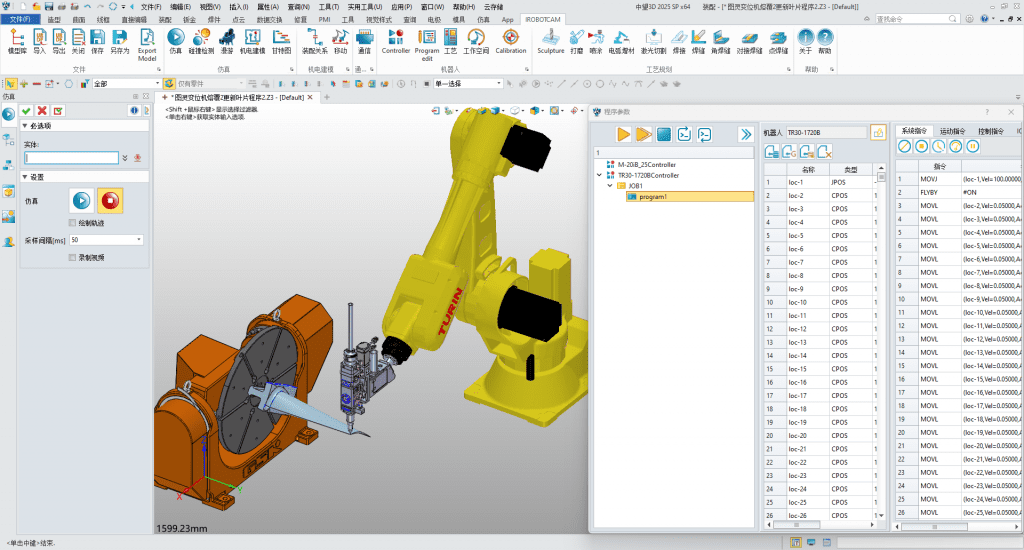
W przypadku zastosowań obróbki laserowej robotów, typowy proces wygląda następująco:
Import robota i przedmiotu obrabianego > pozycjonowanie przedmiotu obrabianego i kalibracja robota > realizacja programowania trajektorii > symulacja wszystkich scen > wyjście kodu i przetwarzanie robota
- Korzystając z cech iRobotCAM opartych na platformie 3D CAD i patrząc na 3D, można szybko utworzyć cyfrowy model scenariusza zastosowania robota
- Korzystając z modułu elektromechanicznego iRobotCAM i wstępnie ustawionej biblioteki robotów, można zdefiniować odpowiednie roboty, narzędzia itp. dla sceny robota
- Zgodnie z potrzebami procesu obróbki laserowej generowane są różne trajektorie od 2 do 5 osi, aby spełnić wymagania trajektorii określonych scenariuszy
- Na podstawie silnika fizycznego iRobotCAM symulowany jest ruch robota, kalibrowany, a odpowiedni kod wykonania jest wyprowadzany.
Oprócz architektury technicznej, najbardziej bezpośrednią percepcją użytkownika jest to, jak łatwe jest programowanie oprogramowania robota, a doświadczenie użytkownika jest jednym z głównych wskaźników. Mówiąc szczerze, postęp w oprogramowaniu przemysłowym nie jest pracą dnia, ale od architektury technicznej po doświadczenie użytkownika, krajowe oprogramowanie przemysłowe poczyniło duże postępy w ostatnich latach, przy tak wielu latach zagranicznego oprogramowania, możesz również wypróbować krajowe oprogramowanie przemysłowe, jeśli chodzi o wybór oprogramowania do programowania robotów offline, możesz również wypróbować iRobotCAM.
Biorąc za przykład użycie robota Turin do realizacji obróbki laserowej pięcioosiowych ostrzy, w jaki sposób iRobotCAM łatwo realizuje obróbkę laserową robota krok po kroku?
O technologii Yueqing
Yueqing Technology stawia sobie za cel zbudowanie otwartej platformy do programowania robotów w trybie offline iRobotCAM. Platforma ta jest cyfrowym rozwiązaniem integrującym elektromechaniczny projekt koncepcyjny linii produkcyjnych, symulację programowania przetwarzania robotów i wirtualne uruchomienie.
iRobotCAM website: www.iRobotCAM.com, contact: cooperation@iRobotCAM.com


