Streszczenie: Mając na celu scenariusze zastosowań automatyzacji jednostek materiałowych robota, iRobotCAM, domowe oprogramowanie do programowania robotów offline opracowane przez YueQing Technology, zapewnia wygodny moduł projektowania jednostek materiałowych, który może szybko nawiązać komunikację z PLC i realizować automatyzację zgodnie z potrzebami jednostek materiałowych.
Jako podstawa projektowania i symulacji debugowania linii produkcyjnej robota, jednostka produkcyjna materiałów wyprowadziła metody projektowania dla różnych komponentów w wygodny sposób. Wracając do źródła, z perspektywy ogólnego przepływu materiałów, proces większości podstawowych scenariuszy materiałowych jest podobny do następującego trybu:
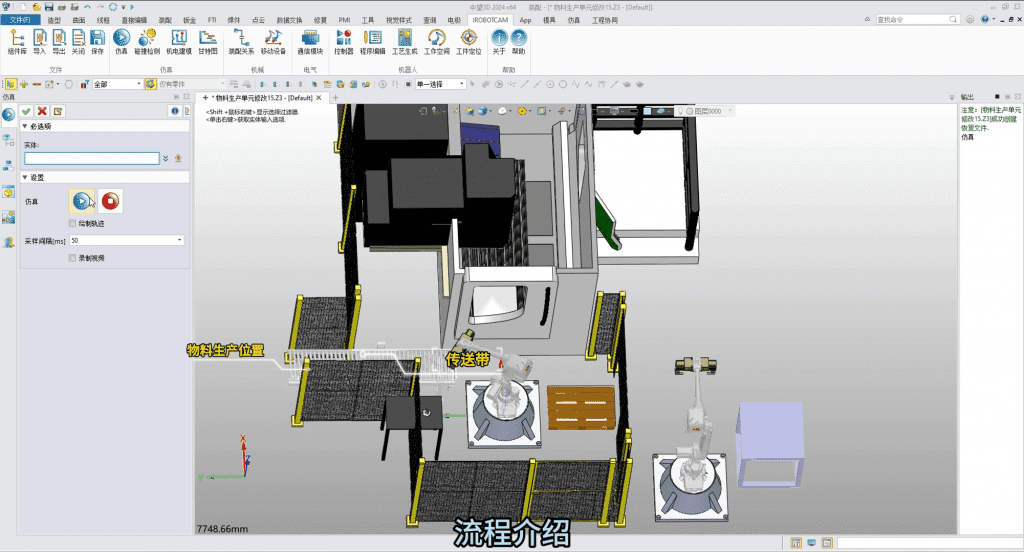
- W scenie wejście taśmy przenośnika produkuje materiały, transportuje materiały do końca, wykrywa materiały na końcu, a taśma przenośnika zatrzymuje się.
- Robot w obszarze załadunku uzyskuje sygnał do zaciśnięcia materiału na obrabiarce w celu przetworzenia i załadunku, a na koniec umieszcza go na płycie przenośnika w celu transportu.
- Robot w obszarze rozładunku czeka, aż płyta przenośnika przetransportuje materiał na zewnątrz, a po uzyskaniu sygnału zaciska materiał na stole do umieszczania materiałów.
- Taśmociąg wlotowy kontynuuje produkcję materiałów, a robot rozpoczyna cykl załadunku i rozładunku.
Projekt funkcji jest bardzo wygodny. Jednostka materiałowa jest w stanie automatycznie generować materiały dla różnych linii produkcyjnych. Okno funkcji jednostki produkcyjnej materiałów jest tworzone poprzez włączenie obiektów produkcyjnych, lokalizacji produkcji i częstotliwości produkcji.
Możliwość rozszerzenia funkcji jest niezwykła. Specjalnie dostosowany do wymagań jednostki materiałowej, potężny silnik fizyczny iRobotCAM może spełnić wymagania symulacji ruchu wielu robotów nawet w bardziej złożonych scenariuszach.
Weźmy na przykład zastosowanie załadunku i rozładunku robota. iRobotCAM może szybko wdrożyć następujące projekty:
Po pierwsze, zaimportuj model robota do sceny z biblioteki komponentów i zmontuj go z robotem, osobno ustawiając narzędzia robota.
Po drugie, oprogramowanie umożliwia dodawanie znaczników poprzez nauczanie metodą „przeciągnij i upuść”, wraz z dodawaniem instrukcji programu robota, kontrolując w ten sposób program robota w celu wykonania funkcji załadunku i rozładunku.
Na koniec, do sceny można dodać wiele robotów, a instrukcje programu robota są zarządzane przez kontroler wielu robotów w celu wykonania funkcji obszaru załadunku i rozładunku.
Jako jednostka produkcyjna materiałów, będziemy dalej badać, w jaki sposób iRobotCAM wygodnie osiąga automatyzację jednostki materiałowej robota, za pośrednictwem poniższego filmu.
O technologii Yueqing
Yueqing Technology stawia sobie za cel zbudowanie otwartej platformy do programowania robotów offline iRobotCAM. Platforma ta jest cyfrowym rozwiązaniem integrującym elektromechaniczny projekt koncepcyjny linii produkcyjnych, symulację programowania przetwarzania robotów oraz wirtualne debugowanie.
iRobotCAM website: www.iRobotCAM.com; Contact: cooperation@iRobotCAM.com


