Zusammenfassung: Wuhan Needs Intelligence ist eine Kooperation mit Nanjing Yueqing Technology eingegangen, um den digitalen Zwillingsprototyp des Roboters zu realisieren, die Korrelation zwischen Roboterunterricht und Roboteranwendungsprogrammierung zu demonstrieren und die Anwendungsszenarien des Roboters intuitiv zu demonstrieren.
Wuhan Needs Intelligence ist eine Kooperation mit Nanjing Yueqing Technology eingegangen, um digitale Zwillinge der physischen und virtuellen Welt für Roboteranwendungsszenarien zu realisieren und die Offline-Programmiersoftware iRobotCAM für Roboter sowie die SPS-Kommunikation von Robotern zu realisieren, die Intelligenz, präzise Steuerung von Gelenkbewegungen usw. benötigen. Das Zwillingsanwendungsmodell zeigt die Korrelation zwischen Roboterlehre und Roboteranwendungsprogrammierung und stellt die Anwendungsszenarien von Robotern intuitiv dar.
Für die Anwendung digitaler Zwillinge gibt es in der Industrie aktuell zwei unterschiedliche technische Ansätze.
Der Virtual-Reality-Weg, der sich auf Simulationseffekte konzentriert, verwendet im Allgemeinen Spiele-Engines wie Unity als Basistechnologie und entwickelt diese basierend auf Branchenmerkmalen weiter, um die erforderlichen Simulationsanwendungseffekte anzupassen.
Basierend auf der physikalischen Modellierung wird durch die Schaffung einer Brücke zwischen der physischen und der virtuellen Welt die Interaktion zwischen Realität und Virtualität realisiert und ein echter digitaler Zwilling realisiert.
In Bezug auf die technologische Anwendung erfordert die digitale Zwillingswelt, die durch die Modellierung der physischen Welt entsteht, angesichts diskreter abstrakter Modelle von Schlüsselelementen der physischen realen Welt oft höhere F&E-Investitionen. Für industrielle Anwendungen bietet diese echte digitale Zwillingsarchitektur jedoch einen höheren Wert. Sie kann komplexe physische Szenen effektiv in der virtuellen Welt darstellen und durch weiteres virtuelles Debuggen von Robotern Veränderungen in der physischen Welt vorantreiben.
Für den Anwendungsbereich von Industrierobotern basiert die technische Auswahl der Offline-Roboterprogrammierungssoftware iRobotCAM auf CAD-Daten, um die Interoperabilität zwischen der physischen und virtuellen Welt zu gewährleisten und echte digitale Zwillingsanwendungen zu realisieren. Wie realisiert die Offline-Programmierungssoftware iRobotCAM für Industrieroboter den Aufbau der komfortablen virtuellen Programmierumgebung von iRobotCAM?
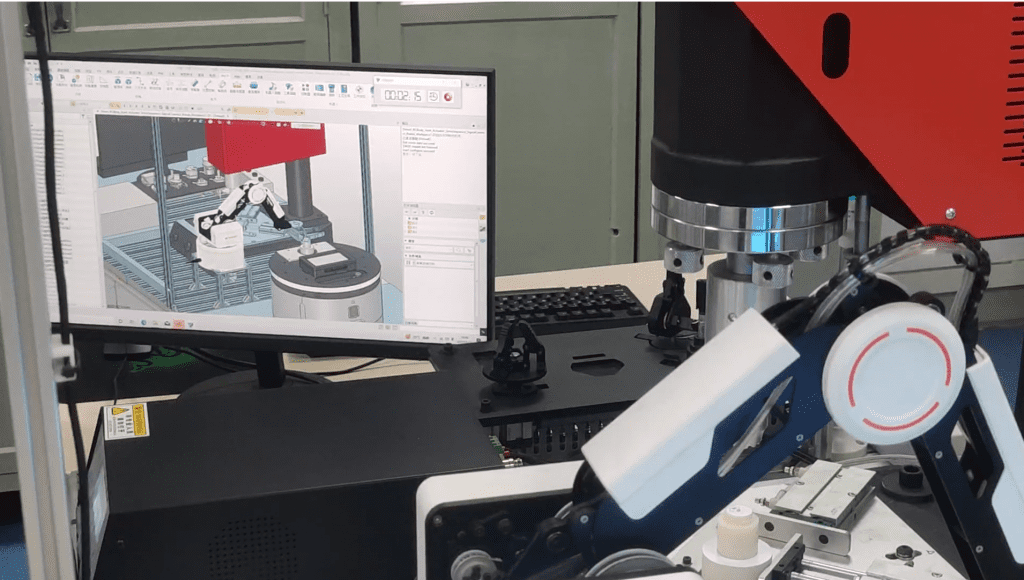
- Simulation der Motormontage, einschließlich Robotern, Schnellwechselvorrichtungen, Förderstrecken und verschiedenen Sensoren
- Virtuelle und reale synchrone Simulation, Erfassung von Produktionsliniendaten und Zuordnung von Motion-Controller-Daten und SPS-Daten zum Simulationssystem
- Unterstützt Systemsimulationen, einschließlich Förderbändern, mehreren Robotern und Materialsystemen. Unterstützt Systemsimulationen, einschließlich Förderbändern, mehreren Robotern und Materialsystemen.
Durch die schnelle Erstellung von Anwendungsszenarien und die Verbindung mit entsprechenden Kommunikationsmodulen kann iRobotCAM virtuelles Debugging von Robotern und Anwendungsszenarien für digitale Zwillinge realisieren.
Über iRobotCAM :
Yueqing Technology hat sich auf die Entwicklung von Komplettlösungen für die Gestaltung von Produktionslinien, die Offline-Programmierung von Robotern und das virtuelle Debugging spezialisiert.
iRobotCAM-Website: www.iRobotCAM.com, E-Mail: cooperation@iRobotCAM.com


