초록: 우한 니즈 인텔리전스는 난징 웨칭 테크놀로지와 협력하여 로봇의 디지털 트윈 프로토타입을 실현하고, 로봇 티칭과 로봇 응용 프로그래밍 간의 상관관계를 보여주고, 로봇의 응용 시나리오를 직관적으로 시연했습니다.
우한 니즈 인텔리전스는 난징 웨칭 테크놀로지와 협력하여 로봇 응용 시나리오를 위한 물리적 세계와 가상 세계의 디지털 트윈을 실현하고, 지능이 필요하고 관절 운동의 정밀한 제어가 필요한 로봇의 iRobotCAM 로봇 오프라인 프로그래밍 소프트웨어와 PLC 통신을 실현합니다. 디지털 트윈 응용 모델은 로봇 티칭과 로봇 응용 프로그래밍 간의 상관 관계를 보여주고 로봇의 응용 시나리오를 직관적으로 표시합니다.
현재 업계에서는 디지털 트윈을 적용하는 데 두 가지 기술적 경로가 있습니다.
시뮬레이션 효과에 중점을 둔 가상현실 경로는 일반적으로 Unity와 같은 게임 엔진을 기본 기술로 사용하며, 산업 특성에 따라 필요한 시뮬레이션 응용 효과를 사용자 정의하여 더욱 발전시킵니다.
물리적 모델링을 기반으로 물리적 세계와 가상 세계 사이에 다리를 구축함으로써 현실과 가상 세계의 상호작용이 실현되고, 진정한 디지털 트윈이 실현됩니다.
기술 적용 측면에서, 물리적 세계를 모델링하여 형성되는 디지털 트윈 세계는 물리적 현실 세계의 핵심 요소에 대한 개별적인 추상 모델에 비해 더 많은 R&D 투자를 필요로 하는 경우가 많습니다. 그러나 산업 분야에서는 이러한 진정한 디지털 트윈 아키텍처가 더 큰 가치를 지닙니다. 가상 세계에서 복잡한 물리적 장면을 효과적으로 표현할 수 있을 뿐만 아니라, 로봇의 가상 디버깅을 통해 물리적 세계의 변화를 더욱 촉진할 수 있습니다.
산업용 로봇 응용 분야에서 iRobotCAM 로봇 오프라인 프로그래밍 소프트웨어의 기술적 선정 측면에서, iRobotCAM은 CAD 데이터를 기반으로 물리적 세계와 가상 세계 간의 상호 운용성을 확보하고 진정한 디지털 트윈 애플리케이션을 구현합니다. 구체적으로, iRobotCAM 산업용 로봇 오프라인 프로그래밍 소프트웨어는 iRobotCAM의 편리한 가상 프로그래밍 환경 구축을 어떻게 실현할까요?
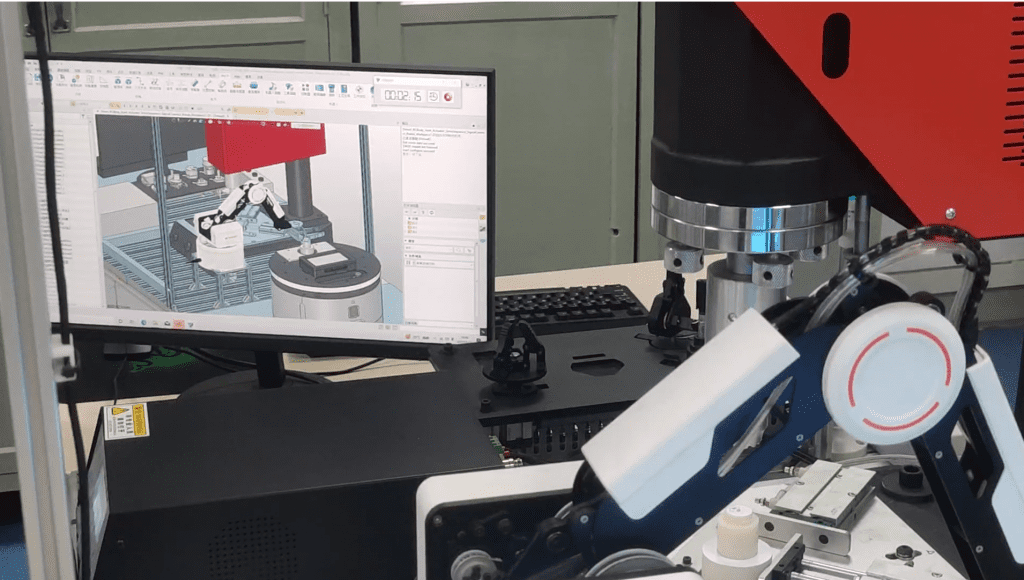
- 로봇, 퀵 체인지 장치, 컨베이어 라인, 다양한 센서를 포함한 모터 조립 시뮬레이션
- 가상 및 실제 동기 시뮬레이션, 생산 라인 데이터 수집, 모션 컨트롤러 데이터 및 PLC 데이터를 시뮬레이션 시스템에 매핑
- 컨베이어 라인, 다중 로봇, 자재 시스템을 포함한 시스템 시뮬레이션을 지원합니다. 컨베이어 라인, 다중 로봇, 자재 시스템을 포함한 시스템 시뮬레이션을 지원합니다.
iRobotCAM은 신속하게 애플리케이션 시나리오를 구축하고 해당 통신 모듈에 연결함으로써 로봇 가상 디버깅과 디지털 트윈 애플리케이션 시나리오를 실현할 수 있습니다.
iRobotCAM 소개 :
웨칭테크놀로지는 생산라인 설계, 로봇 오프라인 프로그래밍, 가상 디버깅을 위한 올인원 솔루션 개발에 전념하고 있습니다.
iRobotCAM 웹사이트: www.iRobotCAM.com, 이메일: cooperation@iRobotCAM.com


