Résumé : Wuhan Needs Intelligence a conclu une coopération avec Nanjing Yueqing Technology pour réaliser le prototype de jumeau numérique du robot, démontrer la corrélation entre l’enseignement du robot et la programmation de l’application du robot, et démontrer intuitivement les scénarios d’application du robot.
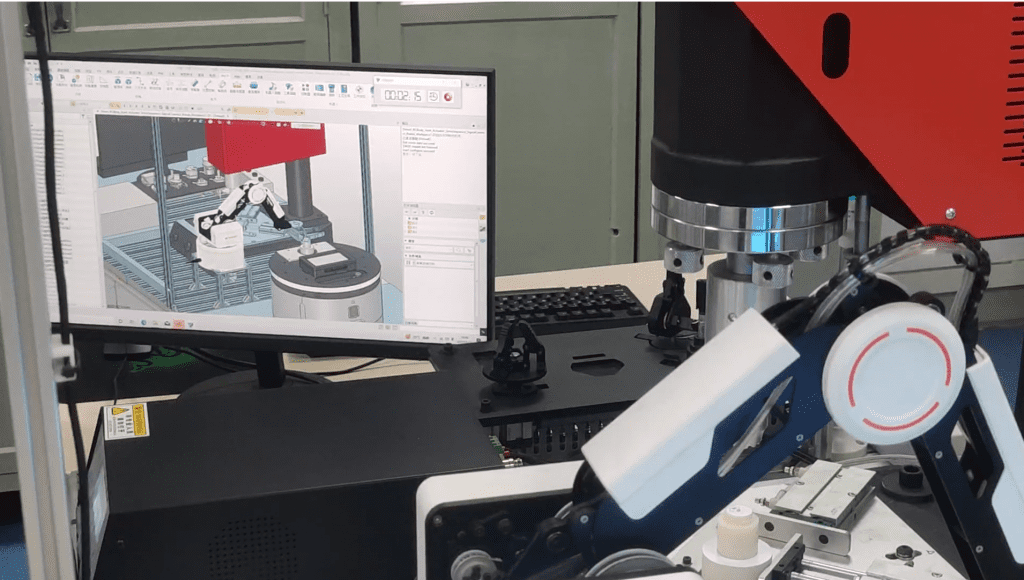
Wuhan Needs Intelligence a conclu une coopération avec Nanjing Yueqing Technology pour réaliser des jumeaux numériques du monde physique et du monde virtuel pour les scénarios d’application de robots, réaliser le logiciel de programmation hors ligne de robot iRobotCAM et la communication PLC des robots qui ont besoin d’intelligence, le contrôle précis des mouvements articulaires, etc., en utilisant le numérique Le modèle d’application jumeau montre la corrélation entre l’enseignement du robot et la programmation de l’application du robot, et affiche intuitivement les scénarios d’application des robots.
Pour l’application des jumeaux numériques, il existe actuellement deux voies techniques différentes dans l’industrie.
La voie de la réalité virtuelle qui se concentre sur les effets de simulation utilise généralement des moteurs de jeu tels qu’Unity comme technologie de base et se développe davantage en fonction des caractéristiques de l’industrie pour personnaliser les effets d’application de simulation requis.
Sur la base de la modélisation physique, en établissant un pont entre le monde physique et le monde virtuel, l’interaction entre la réalité et la virtualité est réalisée, et un véritable jumeau numérique est réalisé.
En termes d’application technologique, le jumeau numérique, formé par la modélisation du monde physique, nécessite souvent davantage d’investissements en R&D face aux modèles abstraits discrets des éléments clés du monde réel. Cependant, pour les applications industrielles, cette véritable architecture de jumeau numérique présente une valeur ajoutée supérieure. Elle permet de présenter efficacement des scènes physiques complexes dans le monde virtuel et d’induire des changements dans le monde physique grâce à un débogage virtuel plus poussé des robots.
Pour les domaines d’application des robots industriels, le choix technique du logiciel de programmation hors ligne iRobotCAM repose sur les données CAO afin d’assurer l’interopérabilité entre le monde physique et le monde virtuel et de réaliser de véritables applications de jumeaux numériques. Plus précisément, comment le logiciel de programmation hors ligne iRobotCAM permet-il de créer l’environnement de programmation virtuel pratique d’iRobotCAM ?
- Simulation d’assemblage de moteurs, y compris des robots, des dispositifs de changement rapide, des lignes de convoyage et divers capteurs
- Simulation synchrone virtuelle et réelle, collecte des données de la ligne de production et mappage des données du contrôleur de mouvement et des données de l’API au système de simulation
- Prend en charge la simulation de systèmes, notamment de lignes de convoyage, de robots multiples et de systèmes de matériaux. Prend en charge la simulation de systèmes, notamment de lignes de convoyage, de robots multiples et de systèmes de matériaux.
En créant rapidement des scénarios d’application et en se connectant aux modules de communication correspondants, iRobotCAM peut réaliser des scénarios d’application de débogage virtuel de robot et de jumeau numérique.
À propos d’iRobotCAM :
La technologie Yueqing se consacre au développement de solutions tout-en-un pour la conception de lignes de production, la programmation hors ligne de robots et le débogage virtuel.
Site Web d’iRobotCAM : www.iRobotCAM.com, Courriel : cooperation@iRobotCAM.com


