Abstrakt: Wuhan Needs Intelligence dosáhla spolupráce s Nanjing Yueqing Technology za účelem realizace prototypu digitálního dvojčete robota, demonstrování korelace mezi učením robota a programováním aplikací robota a intuitivní demonstrací aplikačních scénářů robota.
Společnost Wuhan Needs Intelligence dosáhla spolupráce s technologií Nanjing Yueqing, aby realizovala digitální dvojčata fyzického světa a virtuálního světa pro scénáře aplikací robotů, realizovala offline programovací software pro roboty iRobotCAM a PLC komunikaci robotů, které potřebují inteligenci, přesné řízení pohybů kloubů atd., pomocí digitálního Dvojitý aplikační model ukazuje korelaci mezi výukou robota a scénářem aplikace robota a intuitivně zobrazuje roboty aplikace.
Pro aplikaci digitálních dvojčat v současné době existují v průmyslu dvě různé technické cesty.
Cesta virtuální reality, která se zaměřuje na efekty simulace, obecně využívá herní enginy, jako je Unity, jako základní technologii a dále se vyvíjí na základě průmyslových charakteristik, aby bylo možné přizpůsobit požadované efekty simulační aplikace.
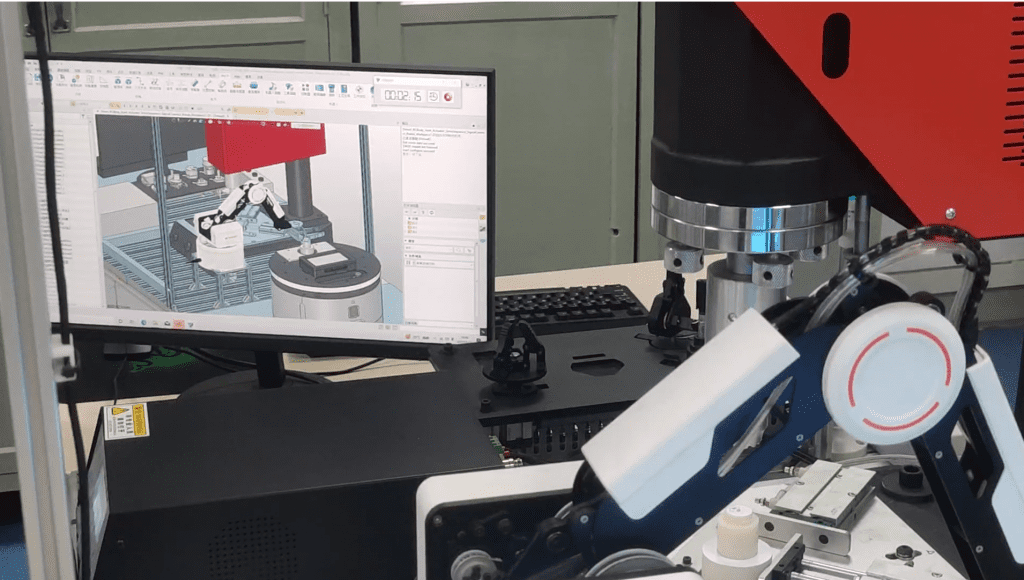
Na základě fyzického modelování, vytvořením mostu mezi fyzickým světem a virtuálním světem, je realizována interakce mezi realitou a virtualitou a je realizováno skutečné digitální dvojče.
Pokud jde o aplikaci technologií, svět digitálního dvojčete vytvořený modelováním fyzického světa často vyžaduje více investic do výzkumu a vývoje tváří v tvář diskrétním abstraktním modelům klíčových prvků fyzického reálného světa. Avšak pro průmyslové aplikace má tato architektura skutečného digitálního dvojčete vyšší hodnotu. Dokáže efektivně prezentovat složité fyzické scény ve virtuálním světě a může také dále řídit změny ve fyzickém světě prostřednictvím dalšího virtuálního ladění robotů.
Pro aplikační oblasti průmyslových robotů, pokud jde o technický výběr softwaru pro offline programování robotů iRobotCAM, je výběr iRobotCAM založen na datech CAD, aby se dosáhlo interoperability mezi fyzickým světem a virtuálním světem a realizovaly se aplikace skutečného digitálního dvojčete. Jak konkrétně software pro offline programování průmyslových robotů iRobotCAM realizuje konstrukci praktického virtuálního programovacího prostředí iRobotCAM?
- Simulace montáže motoru, včetně robotů, rychlovýměnných zařízení, dopravníkových linek a různých senzorů
- Virtuální a skutečná synchronní simulace, shromažďování dat z výrobní linky a mapování dat ovladače pohybu a PLC dat do simulačního systému
- Podporuje simulaci systému včetně dopravníkových linek, více robotů a materiálových systémů. Podporuje systémové simulace včetně dopravníkových linek, více robotů a materiálových systémů.
Rychlou tvorbou aplikačních scénářů a připojením k odpovídajícím komunikačním modulům může iRobotCAM realizovat virtuální ladění robota a aplikační scénáře digitálního dvojčete.
O iRobotCAM :
Technologie Yueqing se věnuje vývoji řešení typu vše v jednom pro návrh výrobní linky, offline programování robotů a virtuální ladění.
Webové stránky iRobotCAM: www.iRobotCAM.com,E-mail: cooperation@iRobotCAM.com


