Özet: Robot lazer işleme giderek daha fazla kullanılıyor ve robot işleme teknolojisinin hızlı programlanması ve simülasyonu, sürecin doğruluğunu kolayca doğrulayabilir. Yerli robot çevrimdışı programlama yazılımının temsilcisi olarak, iRobotCAM, iRobotCAM’in kullanıcı dostu programlama sürecini kullanarak, süreç programlama ve simülasyon doğrulaması için lazer işlemenin kolaylığını daha da sağlar.
Herhangi bir işleme teknolojisinin doğuşu, endüstriyel uygulamalarda belirli türden sorunları çözmektir. Lazerin uygulanması giderek daha yaygın hale geliyor, bunun başlıca nedeni lazerin enerjisi kontrol edilebilir olduğunda, daha karmaşık işleme teknolojisi gerçekleştirilebilir, böylece çeşitli basit iki eksenli ila beş eksenli lazer kesim türlerinde veya daha karmaşık havacılık ve diğer parçalarda kullanılabilir. Lazer kaynak alanı ayrıca çeşitli parça türlerinin işlem ihtiyaçlarını karşılar. Robotik lazer işlemeyi daha iyi kullanmak için, lazerin donanım yeteneklerinin yanı sıra, işlem oluşturma yörüngelerinin ve simülasyonlarının rahatlığı ve doğruluğu için daha fazla gereksinim ortaya konmaktadır.
Robotik lazer işleme için, lazer kesim teknolojisindeki zorlukları örnek olarak ele alırsak, esas olarak aşağıdakiler vardır:
- Düşük konumlandırma ve düzeltme verimliliği ve zayıf uyarlanabilirlik : Çizgi lazer konumlandırma veya direnç konumlandırma yöntemlerinin sınırlamaları vardır. Çizgi lazer kesişimi girişime karşı hassastır ve direnç konumlandırmanın iş parçasının yerleştirilmesi için gereksinimleri vardır. Konumlandırma ve düzeltme İş parçasının yerleştirilmesinde herhangi bir sapma varsa, konumlandırmada başarısız olmak kolaydır. Büyük veya karmaşık iş parçaları için, tüm kenarların tek tek taranması gerekir, bu da daha az verimlidir. Ve bu yöntemler genellikle yalnızca yerel konum düzeltmesi sağlar ve ark şeklindeki özel şekilli parçalara zayıf uyarlanabilirliğe sahiptir.
- Robot yörünge planlaması : Robot yörünge programlaması esnek olmasına rağmen, bazı karmaşık veya hassas kesme görevlerinde, kesme verimliliğini ve kalitesini artırmak için robotun hareket yörüngesinin nasıl optimize edileceği hala bir sorundur.
- Ekipman bakımı ve kalibrasyonu : Lazer kesim robotları, lazer yayıcılar, sensörler ve robotik kollar gibi birden fazla hassas bileşen içerir. Bu bileşenlerin bakımı ve kalibrasyonu, kesim hassasiyetini korumak ve ekipman ömrünü uzatmak için kritik öneme sahiptir. Ancak, düzenli bakım ve kalibrasyonun nasıl yapılacağı ve ekipman arızalarına nasıl hızlı bir şekilde yanıt verileceği, robotik lazer kesim sürecinde karşılaşılması gereken sorunlardır.
Robot çevrimdışı programlama ve simülasyon yazılımı olan iRobotCAM, robot lazer işleme süreçlerinin gereksinimlerini hedef alıyor ve kaynak alanında son on yılda yaptığı araştırma ve geliştirme birikimine dayanıyor.
- Üç boyutlu CAD platformunun ölçeklenebilirliğinden yararlanılarak, lazer kaynak yörüngelerinin çıkarılmasının otomasyonu gerçekleştirilmekte ve lazer yörüngelerinin hassas kontrolü daha da sağlanmaktadır.
- Robot fiziği motorları konusunda uzun yıllara dayanan araştırma ve geliştirme deneyimimizi kullanarak, robot lazer proseslerinin simülasyonunu hızla gerçekleştirebiliyor ve işleme prosesinin dijital ikizini gerçekleştirebiliyoruz.
- iRobotCAM’in yörünge oluşturma ve yörünge optimizasyon modülleri kullanılarak robotun yörüngesi, çarpışmaları, tek noktaları ve ulaşılamayan noktaları önleyecek şekilde otomatik olarak ayarlanabiliyor.
- iRobotCAM’in üretim hattı tasarımı ile robot programlama ve simülasyonunu bir araya getirerek, tasarım ve simülasyonun entegrasyonunu sağlayarak üretim hattı düzeyinde tasarım ve simülasyonu gerçekleştirebilir.
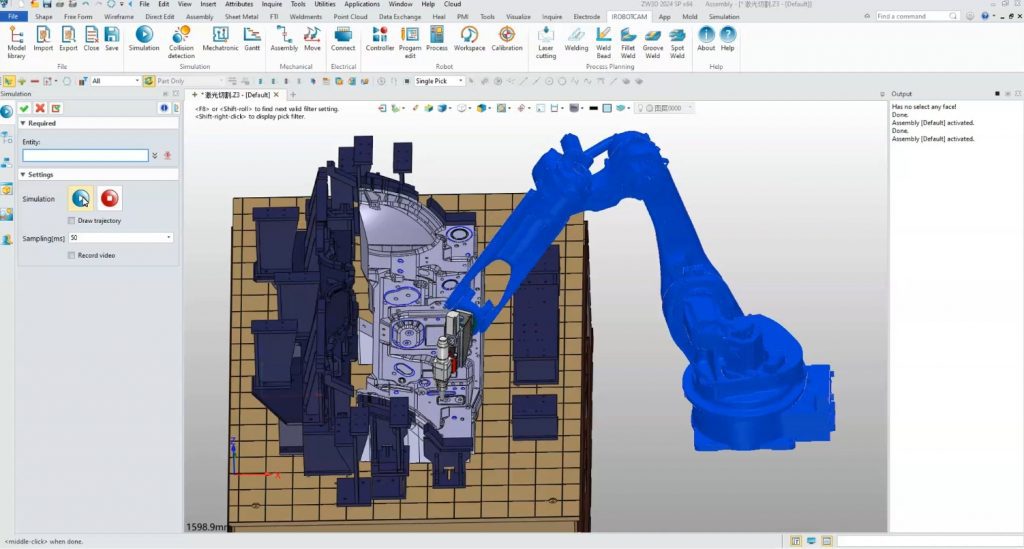
iRobotCAM’in robot lazer işleme programlama ve simülasyonunu nasıl kolaylıkla gerçekleştirebileceğine bir bakalım.
Yueqing Teknolojisi Hakkında :
Yueqing Technology, üretim hatlarının elektromekanik kavramsal tasarımını, robot işleme programlama simülasyonunu ve sanal hata ayıklamayı birleştiren dijital bir çözüm olan açık bir iRobotCAM robot çevrimdışı programlama platformu oluşturmaya kendini adamıştır.


