초록: 로봇 소재 단위 자동화의 적용 시나리오를 목표로, YueQing Technology에서 개발한 가정용 로봇 오프라인 프로그래밍 소프트웨어인 iRobotCAM은 편리한 소재 단위 설계 모듈을 제공하며, PLC와 빠르게 통신을 구축하고 소재 단위의 요구에 따라 자동화를 실현할 수 있습니다.
로봇 생산 라인의 설계 및 시뮬레이션 디버깅을 위한 기반으로, 자재 생산 부서는 다양한 구성 요소에 대한 설계 방법을 편리하게 도출해 왔습니다. 다시 원점으로 돌아와, 전체 자재 흐름 관점에서 볼 때, 대부분의 기본적인 자재 시나리오 프로세스는 다음 모드와 유사합니다.
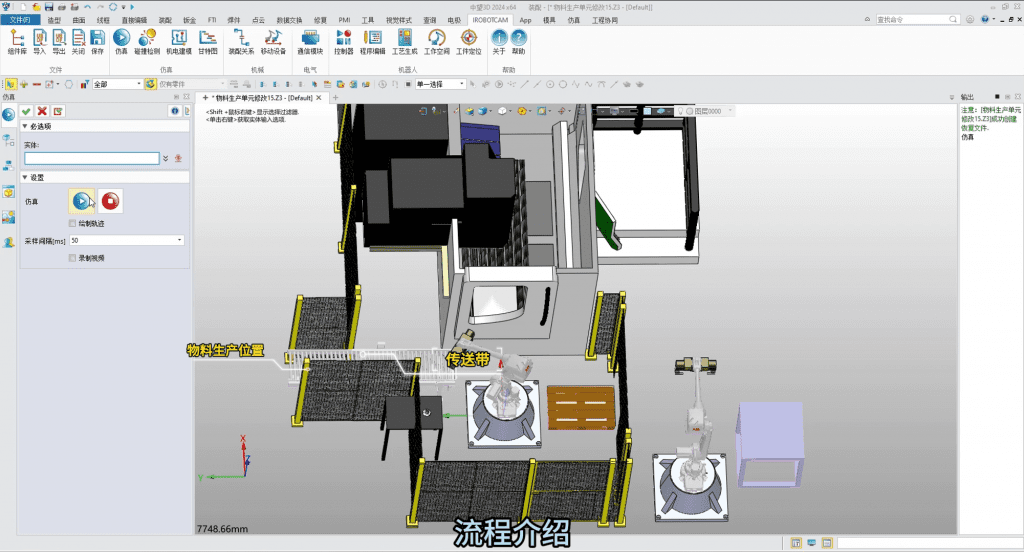
- 이 장면에서 컨베이어 벨트 입구는 재료를 생산하고, 재료를 끝까지 운반하고, 끝에 있는 재료를 감지하고, 컨베이어 벨트가 작동을 멈춥니다.
- 적재 구역의 로봇은 신호를 받아 소재를 가공 및 적재하기 위해 공작 기계에 고정하고, 마지막으로 운반을 위해 컨베이어 플레이트에 놓습니다.
- 하역 구역의 로봇은 컨베이어 플레이트가 재료를 운반할 때까지 기다리고, 신호를 받으면 재료를 재료 배치 테이블에 고정합니다.
- 컨베이어 벨트 입구는 계속해서 재료를 생산하고, 로봇은 적재 및 하역 주기에 들어갑니다.
기능 설계가 매우 편리합니다. 자재 단위는 다양한 생산 라인에 필요한 자재를 자동으로 생성할 수 있습니다. 자재 생산 단위의 기능 창은 생산 대상, 생산 위치, 생산 빈도를 통합하여 구성됩니다.
기능 확장성이 매우 뛰어납니다. 소재 단위의 요구 사항에 맞춰 특별히 설계된 iRobotCAM의 강력한 물리 엔진은 더욱 복잡한 상황에서도 다중 로봇 동작 시뮬레이션의 요구를 충족할 수 있습니다.
로봇 적재 및 하역 작업을 예로 들어 보겠습니다. iRobotCAM은 다음과 같은 설계를 신속하게 구현할 수 있습니다.
첫째, 컴포넌트 라이브러리에서 로봇 모델을 장면으로 가져오고 로봇 도구를 별도로 설정하여 로봇에 조립합니다.
둘째, 소프트웨어는 드래그 앤 드롭 방식의 티칭을 통해 마커를 추가하고 로봇 프로그램 명령어를 추가하여 로봇 프로그램을 제어하여 적재 및 하역 기능을 실행합니다.
마지막으로, 여러 대의 로봇을 장면에 추가할 수 있으며, 로봇 프로그램 명령어는 다중 로봇 컨트롤러에 의해 관리되어 적재 및 하역 영역 기능을 각각 실행합니다.
다음 영상을 통해 iRobotCAM이 소재 생산 장치로서 로봇 소재 유닛의 자동화를 얼마나 편리하게 달성하는지 자세히 살펴보겠습니다.
Yueqing Technology 소개
웨칭테크놀로지는 생산 라인의 전기기계 개념 설계, 로봇 가공 프로그래밍 시뮬레이션, 가상 디버깅을 통합한 디지털 솔루션인 개방형 iRobotCAM 로봇 오프라인 프로그래밍 플랫폼을 구축하는 데 전념하고 있습니다.
iRobotCAM 웹사이트: www.iRobotCAM.com; 문의: cooperation@iRobotCAM.com


