Özet: Bıçaklar gibi karmaşık iş parçalarının işlenmesinde robot lazer kaplama işleminin zorluğu, yüksek hassasiyet özelliklerinin kullanılmasında yatmaktadır ve 3D CAD çekirdeğine dayalı iRobotCAM’in teknik mimari avantajları, yüksek hassasiyet gereksinimlerini etkili bir şekilde karşılayabilir, böylece beş eksenli bıçakların yüksek hassasiyetli lazer kaplama işlemini gerçekleştirebilir.
Kanatların tasarımı ve işlenmesi, küçük fan kanatlarından havacılık kanatlarına kadar farklı uygulama senaryolarına göre belirli senaryolara uyarlanmalıdır, endüstriyel ürünlerin farklı uygulama senaryolarına göre tasarım öğeleri farklıdır, bazıları güzellik odaklı, bazıları sessizlik tabanlı, bazıları performans tabanlı gerektirir ve kanadın nihayetinde ihtiyaçları karşılayıp karşılamadığı farklı endüstrilerin ihtiyaçlarını ve farklı işlem yöntemlerinin gereksinimlerini içerir, çekirdek hassasiyet kontrolüdür, yalnızca doğruluk etkili bir şekilde kontrol edilir, Farklı senaryoların ihtiyaçlarını karşılamanın bir yolu vardır. Kanatların robotik lazer kaplama işlemesini örnek olarak alırsak, iRobotCAM CAD tabanlı mimarisinden yararlanır ve yüksek hassasiyetli mimarinin avantajlarına sahiptir, bunu lazer kaplama işlemeye etkili bir şekilde nasıl uygulayabiliriz?
Robotik lazer işleme uygulamalarında genel süreç şu şekildedir:
Robot ve iş parçasının içe aktarılması> iş parçasının konumlandırılması ve robot kalibrasyonu> yörünge programlamanın gerçekleştirilmesi> tüm sahnelerin simülasyonu> kod çıktısı ve robot işleme
- 3D CAD platformuna dayalı iRobotCAM’in özelliklerini kullanarak ve 3D’ye bakarak, robot uygulama senaryosunun dijital bir modelini hızlı bir şekilde oluşturabilirsiniz
- iRobotCAM’in elektromekanik modülünü ve önceden ayarlanmış robot kütüphanesini kullanarak robot sahnesi için ilgili robotları, araçları vb. tanımlayabilirsiniz.
- Lazer işleme sürecinin ihtiyaçlarına göre, belirli senaryoların yörünge gereksinimlerini karşılamak için çeşitli 2 eksenli ila 5 eksenli yörüngeler üretilir
- iRobotCAM’in fizik motoru temel alınarak robotun hareketleri simüle ediliyor, kalibre ediliyor ve buna karşılık gelen yürütme kodu çıktı olarak veriliyor.
Teknik mimariye ek olarak, en doğrudan kullanıcı algısı robot yazılımının programlanmasının ne kadar kolay olduğudur ve kullanıcı deneyimi temel göstergelerden biridir. Açıkçası, endüstriyel yazılımın ilerlemesi bir günlük iş değildir, ancak teknik mimariden kullanıcı deneyimine kadar, yerli endüstriyel yazılım son yıllarda büyük ilerleme kaydetti, bu kadar çok yabancı yazılımla, yerli endüstriyel yazılımı da deneyebilirsiniz, robot çevrimdışı programlama yazılımı seçimi için, iRobotCAM’ı da deneyebilirsiniz.
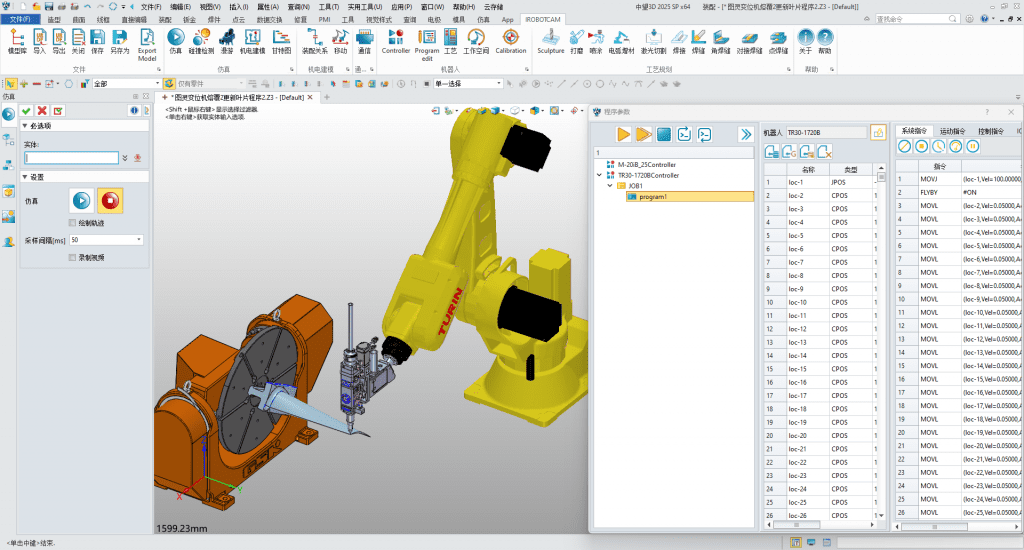
Beş eksenli bıçakların lazer kaplama işleminin Torino robotu kullanılarak gerçekleştirilmesini örnek alırsak, iRobotCAM robot lazer işlemeyi adım adım nasıl kolaylıkla gerçekleştiriyor?
Yueqing Teknolojisi Hakkında
Yueqing Technology, üretim hatlarının elektromekanik kavramsal tasarımını, robot işleme programlama simülasyonunu ve sanal hata ayıklamayı birleştiren dijital bir çözüm olan açık bir iRobotCAM robot çevrimdışı programlama platformu oluşturmaya kendini adamıştır.
iRobotCAM web sitesi: www.iRobotCAM.com


