Technical cases
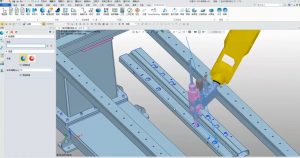
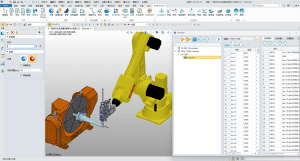
Customer reference: How to use turin robot and iRobotCAM for blade laser cladding processing
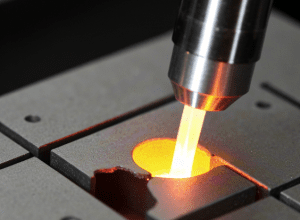
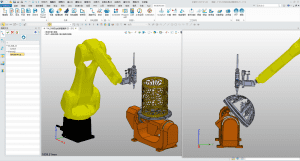
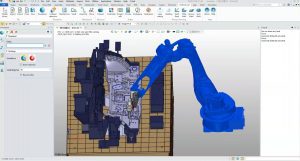
The difficulty of robot laser cladding processing for the processing of complex workpieces such as blades lies in the utilization of high-precision characteristics, and the technical architecture advantages of iRobotCAM based on 3D CAD kernel can effectively meet the requirements of high precision, so as to realize high-precision laser cladding processing of five-axis blades.