Diseño de robots/diseño de líneas de producción/programación fuera de línea/puesta en marcha virtual
Motor de simulación de física confiable
Puesta en servicio virtual con múltiples estaciones de trabajo
Arquitectura de integración de procesos abiertos
Integre rápidamente módulos de proceso personalizados
Diseño y simulación de robots
Admite la importación de docenas de formatos de datos, incluidos Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid, etc.
Admite definición de articulaciones de robot, control de señales, etc.
Admite la importación o exportación de URDF, admite la exportación de parámetros articulares, de inercia y otros, y facilita el uso de sistemas robóticos como sistemas ROS o software de entrenamiento de simulación;
iRobotCAM tiene un motor dinámico completo para garantizar que la URDF de salida cumpla con los requisitos de simulación de software como ROS.
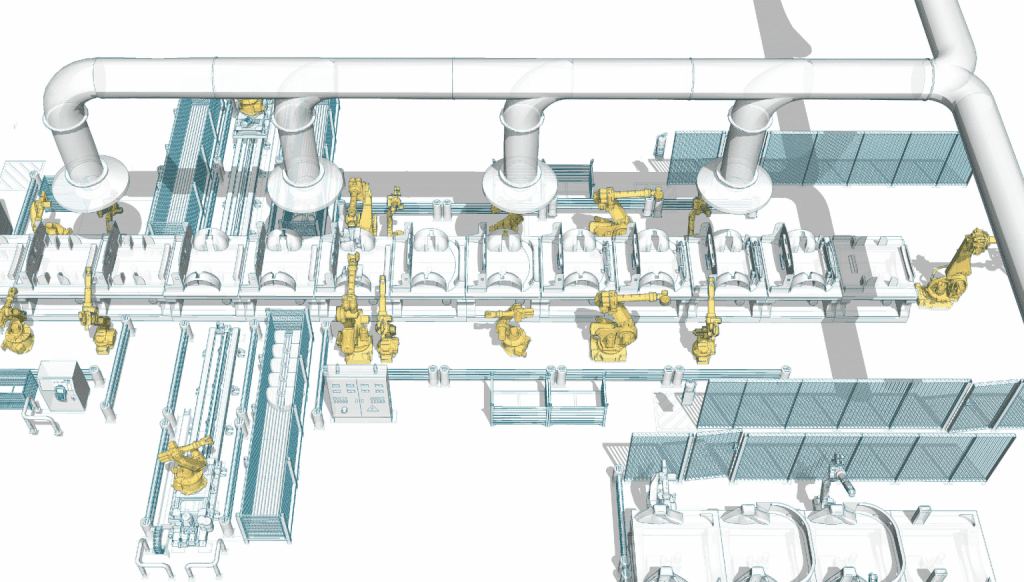
Diseño de línea de producción de robots
Utilice software de diseño paramétrico para cumplir con el diseño de estaciones de trabajo de robot individual y líneas de producción de robot.
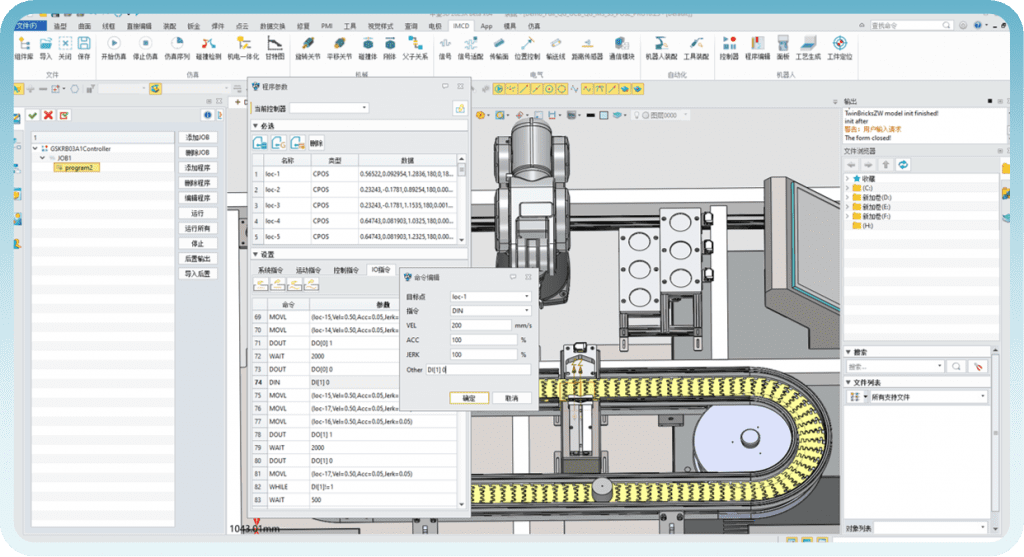
Programación de robots fuera de línea
Proceso de programación de oficina: Importación de modelo de robot–>Planificación de procesos–>Simulación del proceso de mecanizado–>Optimización del sistema de la estación de trabajo–>Salida de código postal
Verificación de programación: Admite la descompilación de programas de robot, lo que puede verificar y optimizar los programas de robot.
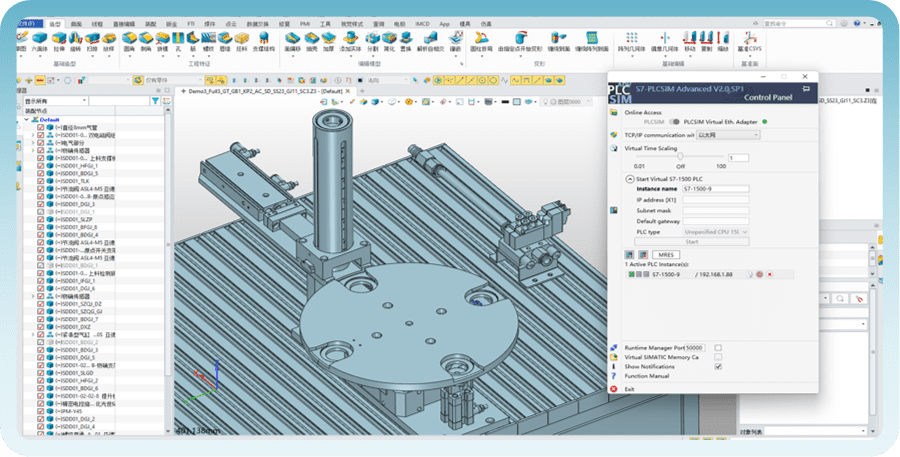
Puesta en servicio virtual del robot
Equipado con depuración virtual y monitoreo virtual, las acciones de la estación de trabajo del sistema de robot virtual y la estación de trabajo del sistema de robot real se pueden sincronizar;
Admite simulación de comunicación de E/S de múltiples máquinas, sincronización de múltiples robots y planificación de vínculos de múltiples ejes de robots.
Obtenga más información sobre las soluciones de mecanizado robótico de iRobotCAM