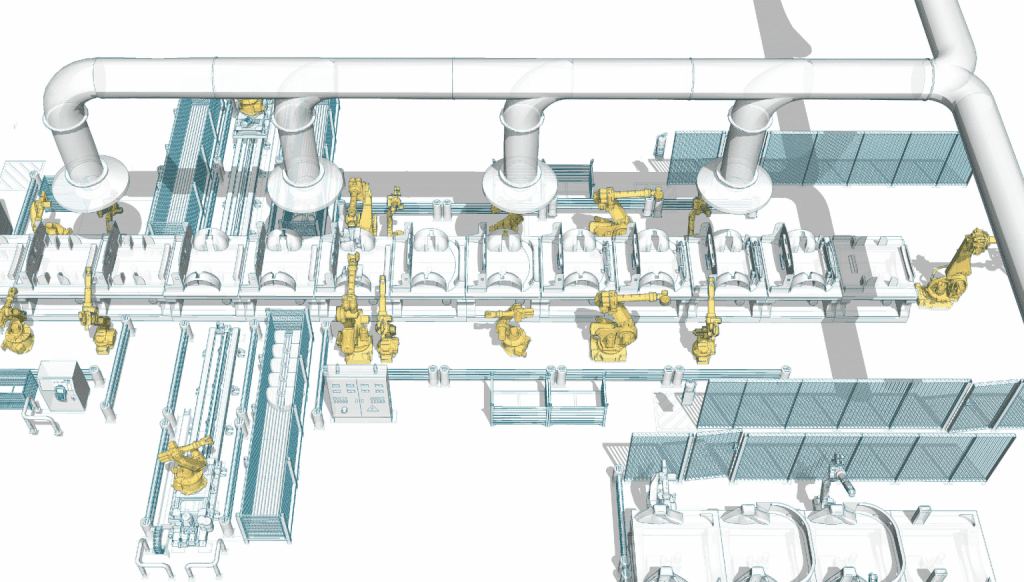
Wykorzystaj oprogramowanie do projektowania parametrycznego, aby sprostać wymaganiom dotyczącym pojedynczych stanowisk robotycznych i linii produkcyjnych robotów.
Programowanie robota offline
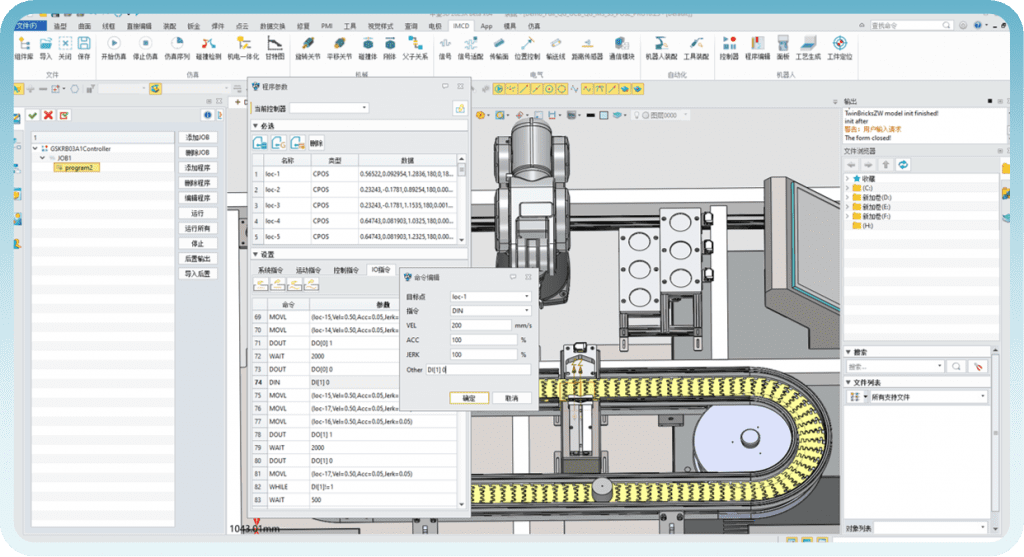
Proces programowania biurowego: Import modelu robota–>Planowanie procesu–>Symulacja procesu obróbki–>Optymalizacja systemu stacji roboczej–>Wyjście kodu pocztowego
Weryfikacja programowania: Obsługa dekompilacji programu robota, która może weryfikować i optymalizować programy robota
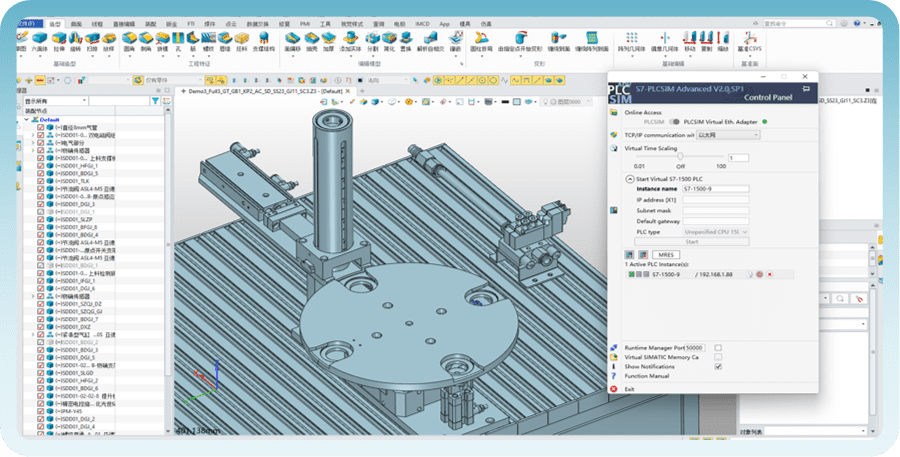
Wirtualne uruchomienie robota
Wyposażony w wirtualne debugowanie i wirtualne monitorowanie, działania wirtualnej stacji roboczej systemu robota i rzeczywistej stacji roboczej systemu robota mogą być synchronizowane;
Obsługuje symulację komunikacji IO wielu maszyn, synchronizację wielu robotów i planowanie połączeń wieloosiowych robotów.
Dowiedz się więcej o rozwiązaniach do obróbki robotycznej iRobotCAM