摘要:机器人的应用场景日趋广泛,而对于统一的机器人数据结构URDF的支持是未来机器人应用的基础,从而可以在未来实现不同机器人之间的通讯交互,实现更多的创新应用。
机器人的设计及应用是当前科技领域的热点,包括特斯拉、小米在内的科技公司都开始涉足机器人尤其是人形机器人领域。中国电子学会《中国机器人产业发展报告 (2022年 )》 指引,预计2022年全球机器人市场规模将达到513亿美元, 其中工业机器人市场规模将达到195亿美元,服务机器人达到217亿美元,特种机器人超过100亿美元。而如果我们进一步分析,我们发现服务机器人大都以开源的机器人操作系统(ROS)为核心,每一个机器人的数字模型由URDF规范来描述,这也就为机器人离线编程软件的应用提出进一步的需求:如何将服务机器人在各个场景中的应用建立通讯机制,而URDF数据结构的规范则是实现这一途径的方法。
而URDF是什么呢? URDF(Unified Robot Description Format)是一种基于XML规范、用于描述机器人结构的格式。它主要用于定义机器人的结构,包括机器人的零部件以及零部件之间的关系。URDF文件可以用于机器人的仿真、可视化以及在ROS(机器人操作系统)中进行解析和描述机器人零部件和零部件之间的关系。在设计和使用机器人时,URDF文件可以帮助人们更好地理解机器人的结构信息,从而进行更有效的机器人控制和操作。
对于大多数的3D CAD软件而言,由于不是专门服务于机器人,所以很少有生成机器人URDF文件的功能,从而造成了在机器人应用领域需要大量的额外工作,需要用不同的软件进行建模、再导入到其他软件上进行关键建模编辑,最后再到不同的软件上进行仿真验证,过程非常复杂。而我们可以看一下国产机器人离线编程软件iRobotCAM是如何实现这一过程的呢?
1.iRobotCAM平台基于国产三维几何内核平台中望3D,由于其和CAD无缝对接的属性,可以实现大规模的机器人装配模型的操作, 实现大场景的搭建
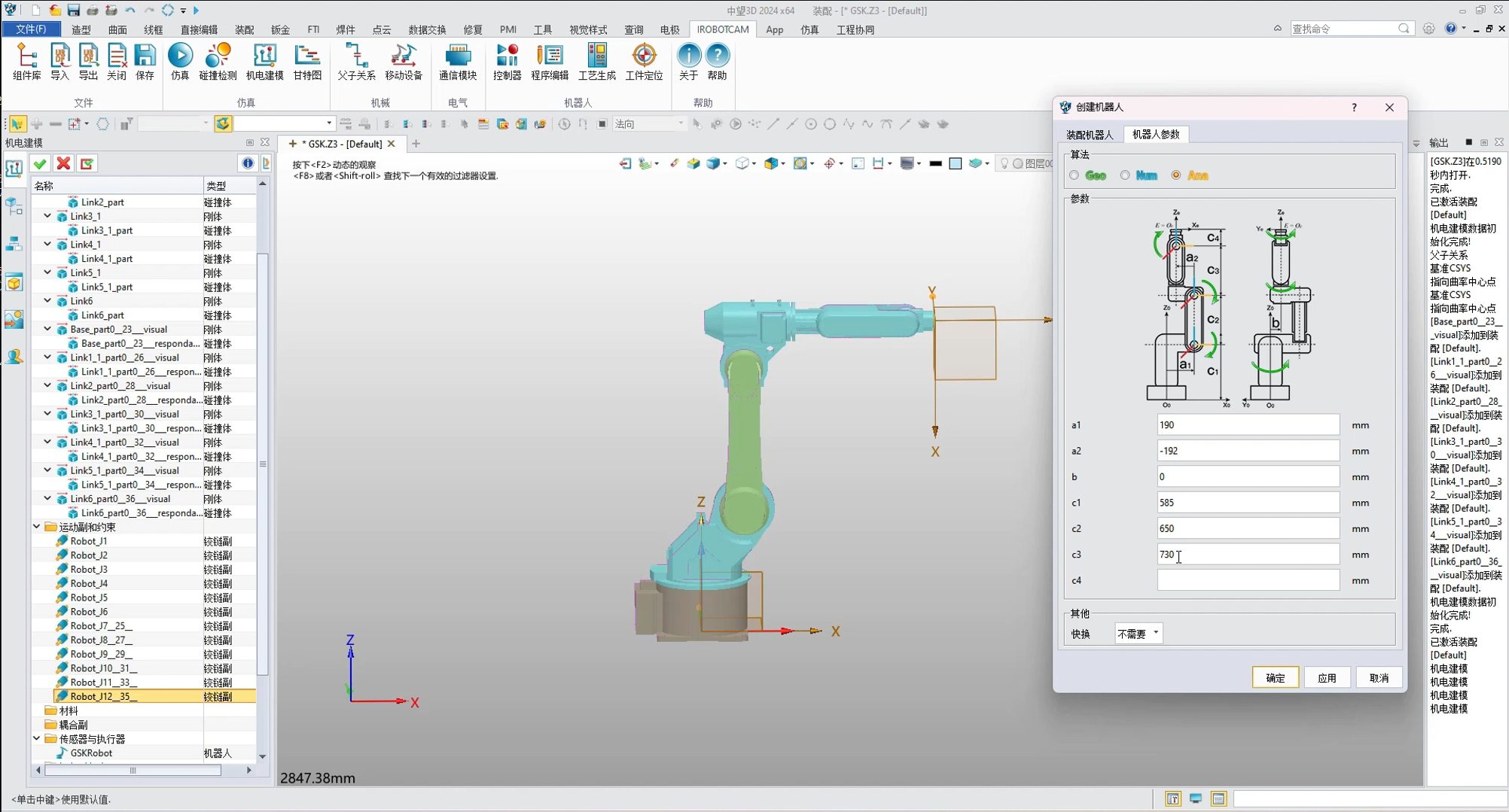
2.iRobotCAM 在机器人应用层面,研发了业的机器人设计模块及可靠物理几何引擎,实现了机器人设计,编程仿真,实现了设计与仿真一体化的方案
3.在不同类型的机器人场景打通方面, iRobotCAM支持URDF的导入和导出,实现了多用途的机器人场景的打通,大大降低了机器人应用的复杂度
下面,我们看一个简单的视频,国产机器人离线编程软件iRobotCAM是如何快速的实现URDF的导入和导出,以及利用URDF数据来定义机器人及实现机器人仿真的:
关于越擎科技:
越擎科技致力于打造开放的iRobotCAM机器人离线编程平台,是集产线机电概念设计以及机器人加工编程仿真,虚拟调试等一体的数字化解决方案.


