Abstrakt: Tváří v tvář problému vysoké prahové hodnoty a vysokých nákladů na modelování robotů a školicí platformu využívá Yueqing Technology své vlastní průmyslové technologické výhody v robotickém softwaru k uvolnění modulu modelování robota založeného na jádře 3D geometrie, rozšíření rozhraní URDF a otevření simulace a analýzy robotů ROS.
Tváří v tvář problému vysoké prahové hodnoty a vysokých nákladů na platformu pro modelování robotů a školicí platformu Yueqing Technology využila své průmyslové technické výhody v softwaru pro roboty a vydala modul pro modelování robotů iRobotCAM založený na platformě jádra 3D geometrie.
- Díky možnostem modelování iRobotCAM a možnostem vlastního fyzikálního enginu může iRobotCAM rychle vytvářet a spravovat modely robotů a provádět fyzické simulace.
- Díky rozšířeným rozhraním pro import a export URDF se iRobotCAM dále propojuje s roboty ROS, což uživatelům umožňuje propojit modelování robotů a simulaci robotů, aby mohli efektivněji trénovat fyzický model robotů.
Níže uvádíme nejjednodušší průmyslový robot jako příklad pro další rozpracování toho, jak používat iRobotCAM k realizaci modelování a tréninkového modelu robota:
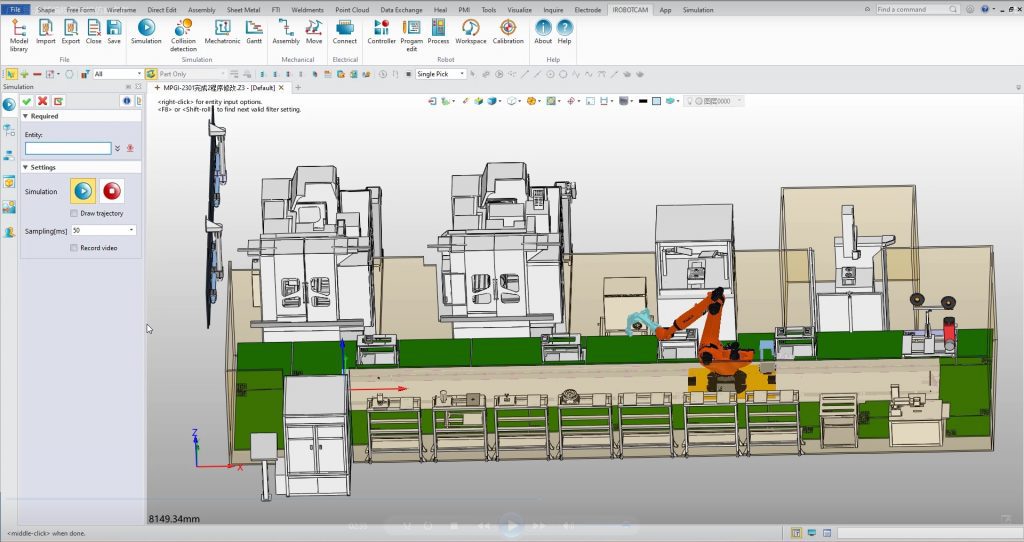
- Digitální 3D modelování scény
- Pomocí funkce 3D modelování může iRobotCAM vytvářet složité 3D modely a dokončit modelování digitálních scén.
- Podporujte import formátů iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid a dalších 3D formátů za účelem opětovného použití stávajících 3D modelů a zlepšení efektivity konstrukce digitálních scén robotů.
- Knihovna mechatronického designu a robotiky
- Vytvoření prostředí senzorových dat: podpora signálových systémů PLC včetně Siemens, Mitsubishi, Inovance a dalších značek a podpora přizpůsobení více zařízení pro přístup k signálu
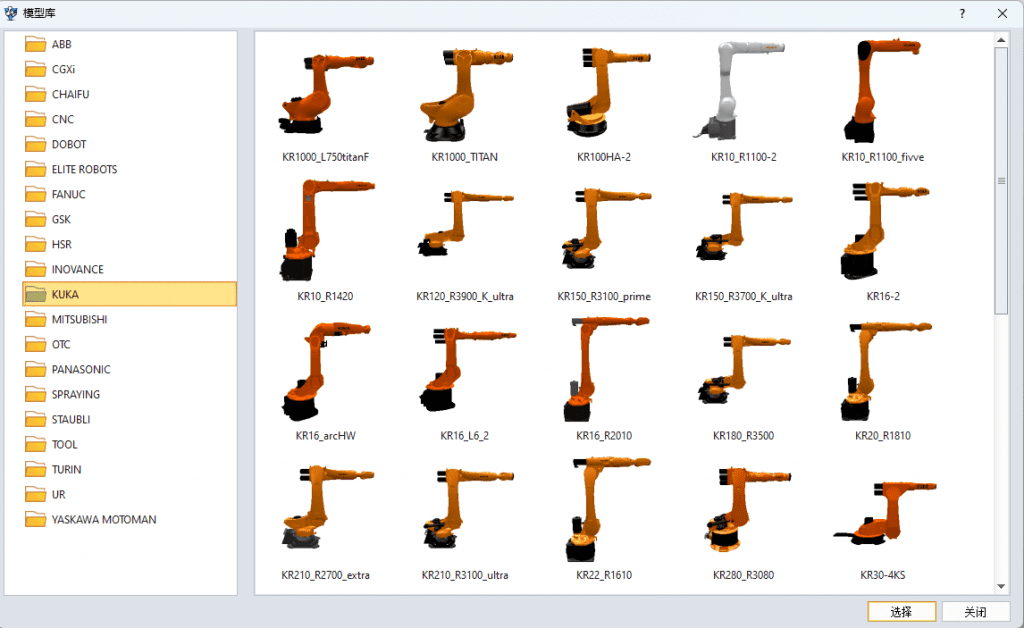
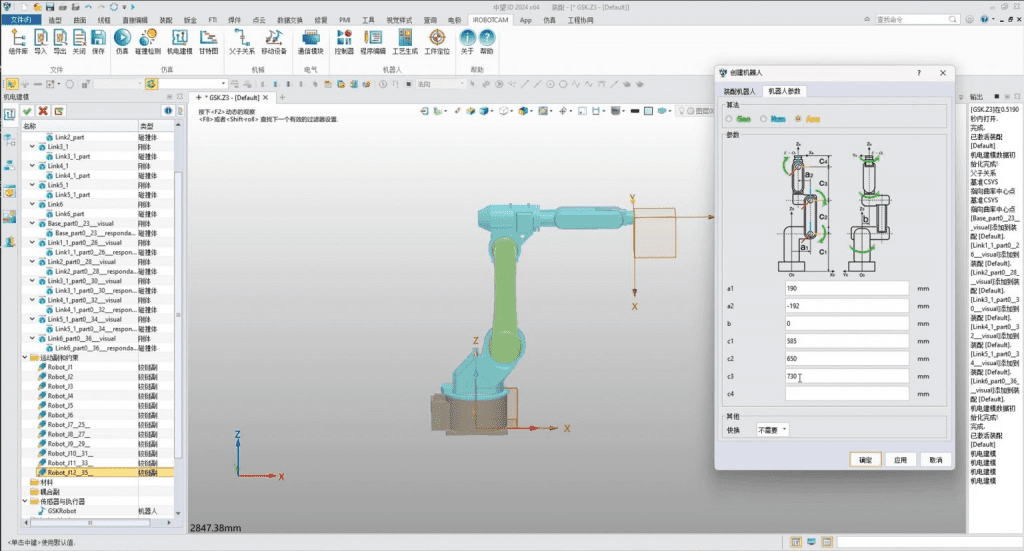
- Zřízení knihovny robotů: Pro průmyslové roboty můžete použít vestavěné knihovny robotů včetně ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO a Turing k vytvoření modelů simulace robotů nebo k vytvoření vlastní knihovny robotů pomocí funkcí přizpůsobení robota. U humanoidních nebo kolových robotů lze podle potřeby stanovit podrobné informace o spojích odpovídajících částí a vytvořit celkovou definici spoje, detekci kolizí atd. tak, aby vytvořila kompletní knihovnu specifických humanoidních nebo kolových robotů.
- Trénink robotů
- Vytvoření modelu plánování trajektorie robota: podpora simulace IO komunikace více strojů, synchronizace více robotů a plánování propojení robotů s více osami;
- Trénink fyzických modelů trénovaných roboty: Podporuje simulaci fyzikálních charakteristik pomocí vlastního fyzikálního enginu, včetně požadavků na vyhýbání se překážkám, analýzy kolizí a dalších datových modelů, a podporuje rozšíření rozhraní třetích stran na podporu trénovacích algoritmů robotů ve specifických scénářích.
- Dokování dat s roboty ROS pro dosažení společného ladění
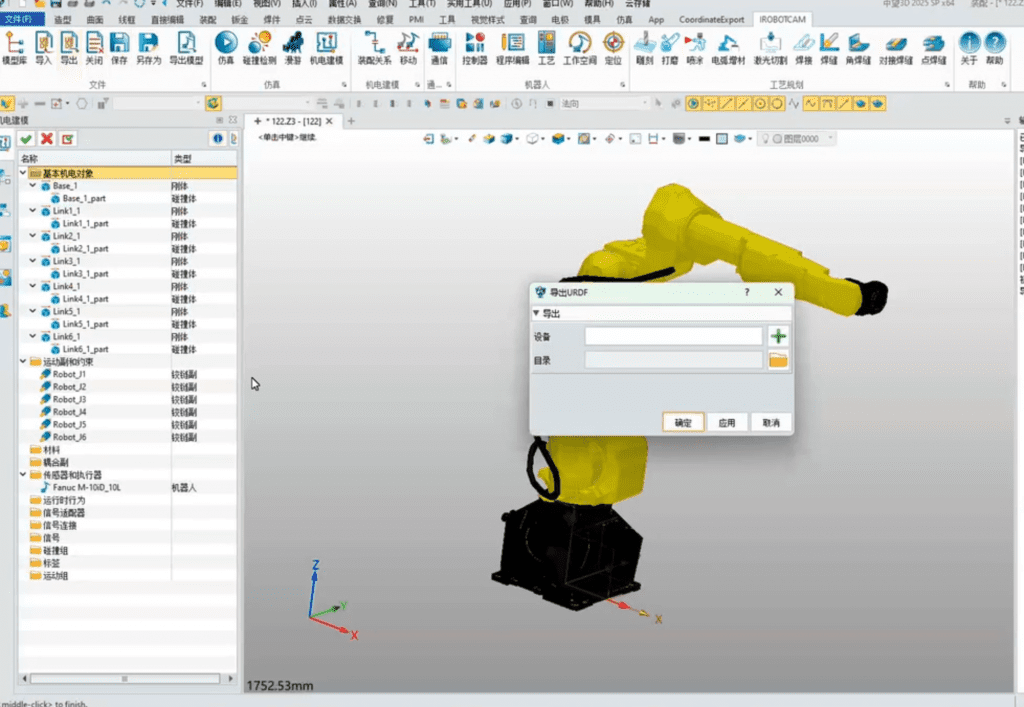
- Model optimalizace robota dokončený iRobotCAM lze exportovat do URDF pro další simulaci a provádění robotů ROS
- Pomocí funkce importu URDF lze základní model robota importovat do iRobotCAM a datové prostředí robota lze dále upravovat a trénovat na iRobotCAM, aby splňovalo cíle návrhu datového modelu robota.
O technologii Yueqing
Yueqing Technology se zavázala k vybudování otevřené offline programovací platformy robotů iRobotCAM, což je digitální řešení integrující elektromechanický koncepční návrh výrobních linek, simulaci programování zpracování robotů a virtuální ladění.
webové stránky iRobotCAM: www.iRobotCAM.com; Kontakt: cooperation@iRobotCAM.com


