Riepilogo: Wuhan Needs Intelligence ha avviato una collaborazione con Nanjing Yueqing Technology per realizzare il prototipo del gemello digitale del robot, dimostrare la correlazione tra l’insegnamento del robot e la programmazione delle applicazioni del robot e illustrare in modo intuitivo gli scenari applicativi del robot.
Wuhan Needs Intelligence ha avviato una collaborazione con Nanjing Yueqing Technology per realizzare gemelli digitali del mondo fisico e del mondo virtuale per scenari applicativi di robot, realizzare il software di programmazione offline del robot iRobotCAM e la comunicazione PLC dei robot che necessitano di intelligenza, controllo preciso dei movimenti delle giunture, ecc., utilizzando il digitale. Il modello applicativo gemello mostra la correlazione tra l’insegnamento del robot e la programmazione delle applicazioni del robot e visualizza in modo intuitivo gli scenari applicativi dei robot.
Per l’applicazione dei gemelli digitali, attualmente nel settore esistono due diversi percorsi tecnici.
Il percorso della realtà virtuale che si concentra sugli effetti di simulazione in genere utilizza motori di gioco come Unity come tecnologia di base e si sviluppa ulteriormente in base alle caratteristiche del settore per personalizzare gli effetti applicativi di simulazione richiesti.
Sulla base della modellazione fisica, creando un ponte tra il mondo fisico e quello virtuale, si realizza l’interazione tra realtà e virtualità e si realizza un vero e proprio gemello digitale.
In termini di applicazione tecnologica, il mondo del gemello digitale, creato modellando il mondo fisico, richiede spesso maggiori investimenti in ricerca e sviluppo a fronte di modelli astratti discreti di elementi chiave del mondo fisico reale. Tuttavia, per le applicazioni industriali, questa vera architettura del gemello digitale ha un valore maggiore. Può presentare efficacemente scene fisiche complesse nel mondo virtuale e può anche guidare ulteriormente i cambiamenti nel mondo fisico attraverso un ulteriore debug virtuale dei robot.
Per quanto riguarda i campi di applicazione dei robot industriali, in termini di selezione tecnica del software di programmazione offline per robot iRobotCAM, la selezione di iRobotCAM si basa sui dati CAD per raggiungere l’interoperabilità tra il mondo fisico e quello virtuale e realizzare applicazioni digital twin. Nello specifico, in che modo il software di programmazione offline per robot industriali iRobotCAM realizza la costruzione del pratico ambiente di programmazione virtuale di iRobotCAM?
- Simulazione di assemblaggio di motori, inclusi robot, dispositivi di cambio rapido, linee di trasporto e vari sensori
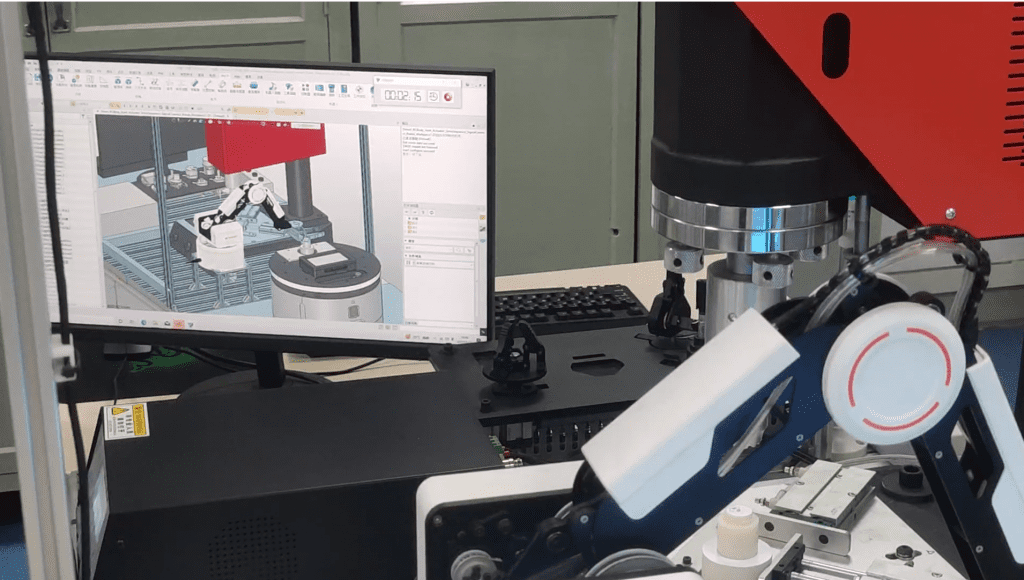
- Simulazione sincrona virtuale e reale, raccolta di dati sulla linea di produzione e mappatura dei dati del controller di movimento e dei dati PLC sul sistema di simulazione
- Supporta la simulazione di sistemi, inclusi linee di trasporto, robot multipli e sistemi di materiali. Supporta la simulazione di sistemi, inclusi linee di trasporto, robot multipli e sistemi di materiali.
Grazie alla rapida creazione di scenari applicativi e alla connessione ai moduli di comunicazione corrispondenti, iRobotCAM è in grado di realizzare scenari applicativi di debug virtuale del robot e di gemelli digitali.
Informazioni su iRobotCAM :
La tecnologia Yueqing è impegnata nello sviluppo di soluzioni complete per la progettazione di linee di produzione, la programmazione offline dei robot e il debug virtuale.
Sito web di iRobotCAM: www.iRobotCAM.com, Email: cooperation@iRobotCAM.com


