Résumé : Yueqing Technology a publié un livre blanc sur la technologie de programmation et de simulation du traitement laser, qui décrit les difficultés du contrôle de haute précision de l’application de la technologie de traitement laser, et discute plus en détail de la trajectoire et du schéma de simulation du traitement laser, comment utiliser efficacement iRobotCAM pour compléter le traitement et la simulation laser, et améliorer considérablement le développement d’équipements pour les scénarios d’application du processus laser et l’efficacité de l’application du processus laser.
- Aperçu de l’industrie du laser
L’industrie du laser représente un énorme potentiel d’emploi et une taille de marché future considérable, et elle traverse une période de développement rapide.
- Caractéristiques de la technologie laser
La principale caractéristique du procédé laser est sa haute précision. Afin de mieux comprendre l’application de la technologie laser, nous partirons du cas des équipements et prendrons comme exemples le développement et l’application des machines-outils laser et des robots d’usinage laser, afin d’analyser plus en détail ses difficultés et d’expliquer les solutions.
- Développement et application de machines-outils laser
À partir du processus de développement des équipements des machines-outils laser, nous pouvons mieux comprendre les difficultés d’application et les solutions de la technologie laser sur les machines-outils.
Processus de développement de machines-outils laser : modélisation de structures 3D < modélisation électromécanique et simulation de mouvement < génération de trajectoires et débogage virtuel < post-traitement et simulation de traitement
Ce qui suit utilise iRobotCAM comme solution logicielle pour le développement et le débogage de machines-outils laser pour expliquer comment mettre en œuvre le développement de machines-outils laser et le débogage virtuel étape par étape, et réaliser la production de masse et l’application de machines-outils laser.
1) Modélisation de la structure 3D : iRobotCAM utilise les caractéristiques de la plate-forme CAO 3D pour créer rapidement un modèle numérique de la structure 3D de la machine-outil.
2) Modélisation électromécanique et simulation de mouvement : iRobotCAM dispose d’un module de modélisation électromécanique permettant la modélisation et la conception de lignes de production, ainsi que le débogage virtuel des robots. Avant la production, le processus d’usinage laser peut être simulé dans un environnement virtuel afin d’anticiper et de résoudre d’éventuels problèmes, tels que les interférences de collisions entre les mouvements du robot, la vérification de la singularité, de l’accessibilité et des collisions, et les erreurs de trajectoire laser, afin de réduire les erreurs et les risques lors du débogage réel et d’améliorer l’efficacité et la sécurité de la production.
3) Génération de trajectoire et débogage virtuel : Développé sur la base de la plate-forme ZW3D, il peut utiliser les différents algorithmes de trajectoire 2 à 5 axes de ZW3D, de sorte que le robot dispose d’algorithmes de trajectoire précis similaires au logiciel CAM pendant le processus de traitement laser, et peut focaliser avec précision le faisceau laser sur la pièce à traiter, réalisant une découpe laser, un soudage, une gravure et d’autres processus de haute précision, garantissant la qualité et la cohérence du traitement.
4). Post-traitement et simulation d’usinage : le module de post-traitement pratique d’iRobotCAM permet de générer rapidement du code et d’afficher intuitivement les effets de la simulation d’usinage.
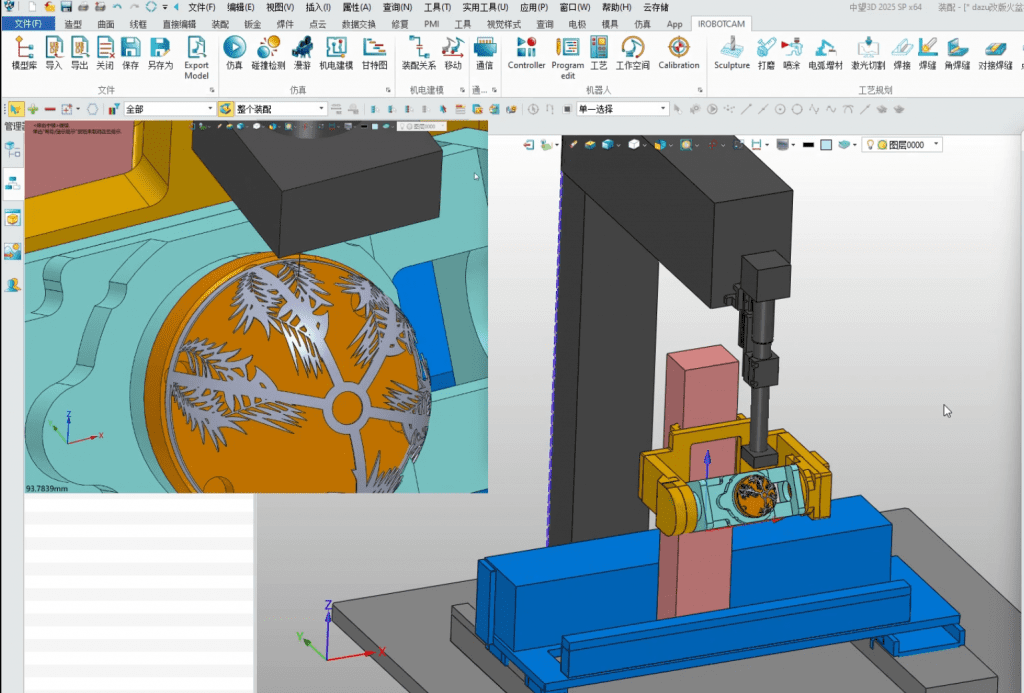
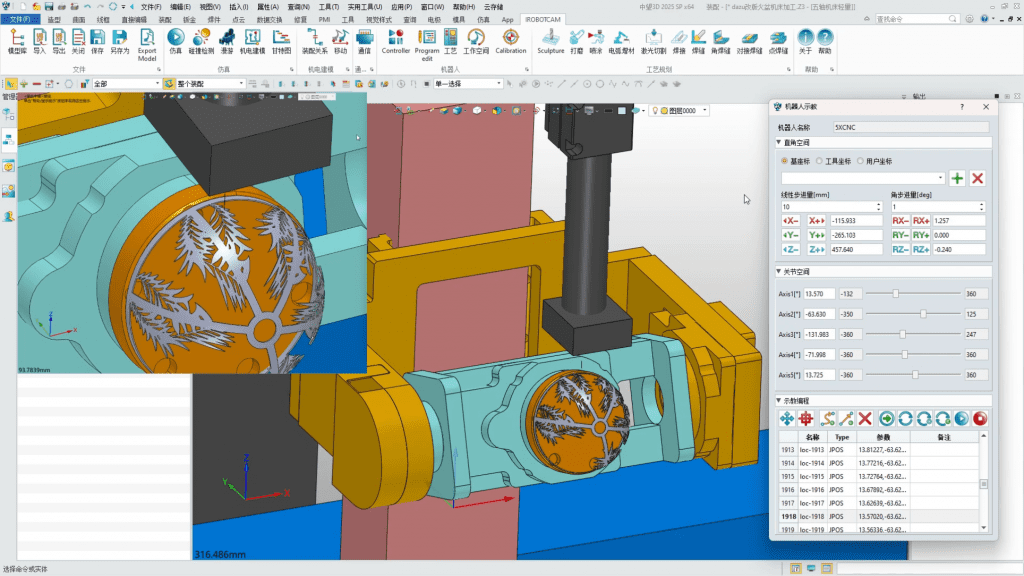
Voyons comment iRobotCAM utilise des machines-outils à 5 axes pour réaliser un traitement et une simulation laser :
4. Application de la technologie laser robotisée
La technologie laser robotisée est principalement axée sur la haute précision. La capacité à réaliser une fabrication de haute précision grâce aux lasers est essentielle à de nombreux secteurs, tels que l’aérospatiale, l’automobile et l’industrie mécanique, pour la fabrication d’équipements haute performance ou de haute précision. Concernant l’industrie robotisée, quelles sont les difficultés liées à l’application de la technologie laser ? Comment la mettre en œuvre rapidement ?
Tout d’abord, pour la technologie de traitement laser robotisé, le processus général est le suivant :
Importation du robot et de la pièce > Positionnement de la pièce et calibrage du robot > Réalisation de la programmation de trajectoire > Simulation de la scène entière > Sortie du code et traitement du robot
Le processus ci-dessus montre que la technologie laser se concentre sur la création d’un environnement numérique, ainsi que sur la production et la simulation de code. Prenons l’exemple du logiciel de programmation hors ligne iRobotCAM pour expliquer comment utiliser iRobotCAM pour une application efficace de la technologie laser robotique.
1) Grâce à iRobotCAM, qui s’appuie sur les capacités de la plateforme de CAO 3D, la numérisation des équipements et des processus peut être rapidement modélisée.
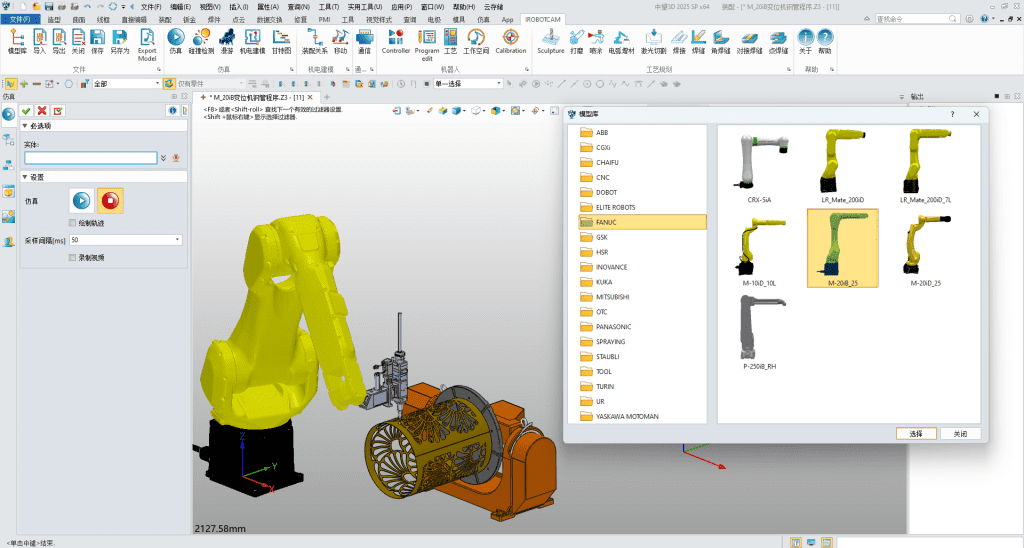
2) . Grâce à la bibliothèque de machines d’iRobotCAM, vous pouvez rapidement construire des robots ou des outils liés aux applications laser, évitant ainsi la nécessité de créer à plusieurs reprises des bibliothèques de pièces de base à l’avenir et aidant les entreprises à utiliser les modèles numériques plus efficacement.
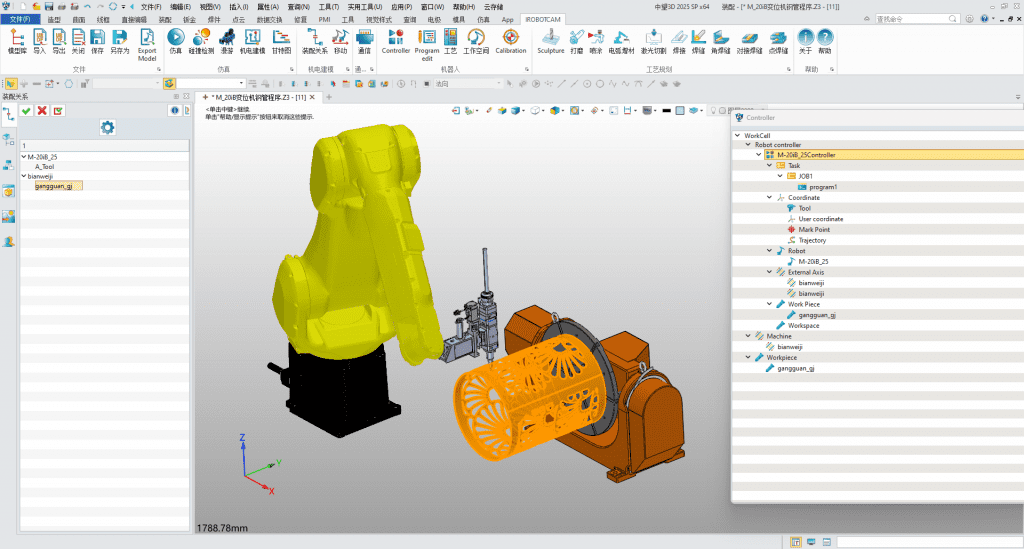
3) Grâce à la fonction de positionnement unique d’iRobotCAM, la pièce peut être positionnée rapidement et précisément selon les exigences d’usinage laser. Plus précisément, iRobotCAM permet de positionner la pièce dans diverses conditions de travail, en fonction des caractéristiques CAO de la pièce.
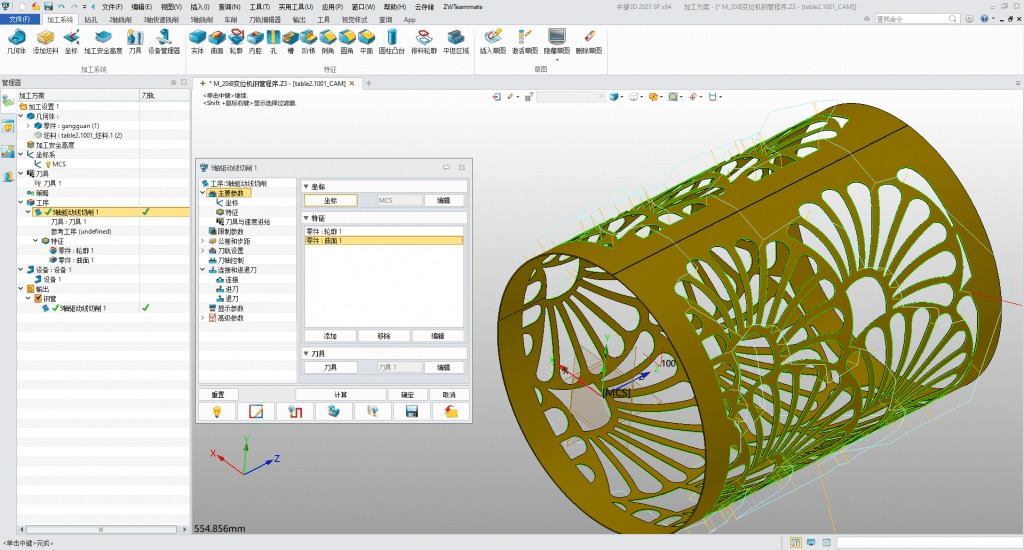
4) . En utilisant la capacité de génération de trajectoire d’iRobotCAM, il est possible de générer des trajectoires multi-axes complexes sur des surfaces courbes et de réaliser l’application de processus laser pour des robots avec plus de 7 axes.
5). Les capacités de débogage virtuel du robot d’iRobotCAM peuvent être utilisées pour réaliser la programmation de scènes laser de robot et la simulation virtuelle, et visualiser efficacement l’effet d’application de la technologie robotique.
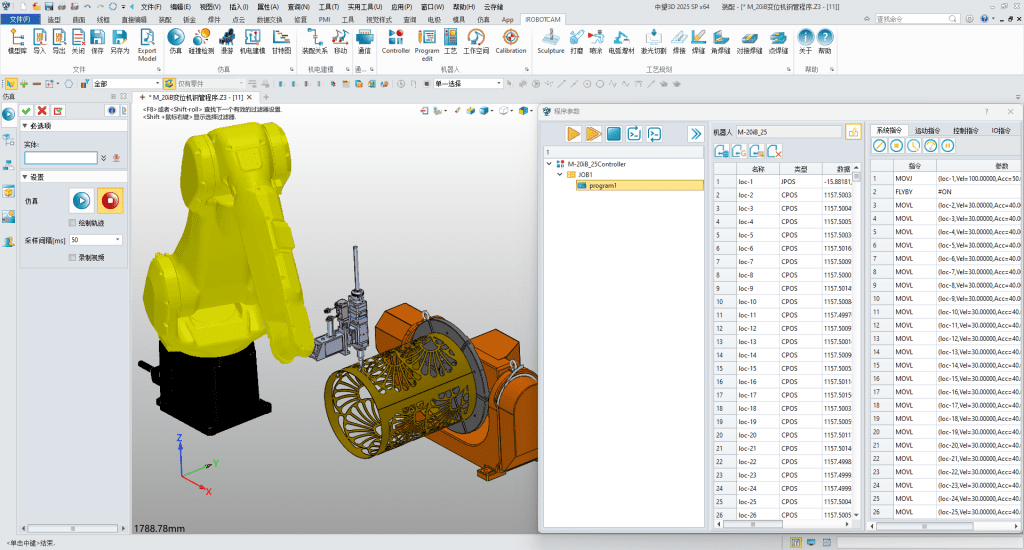
6. En utilisant les capacités de post-traitement d’iRobotCAM, vous pouvez vous adapter efficacement à différents types de robots, notamment FANUC, ABB, Yaskawa, KUKA, GSK, STEP, Estun, Turin, etc., et utiliser efficacement un ensemble de logiciels pour gérer plusieurs marques ou plusieurs appareils.
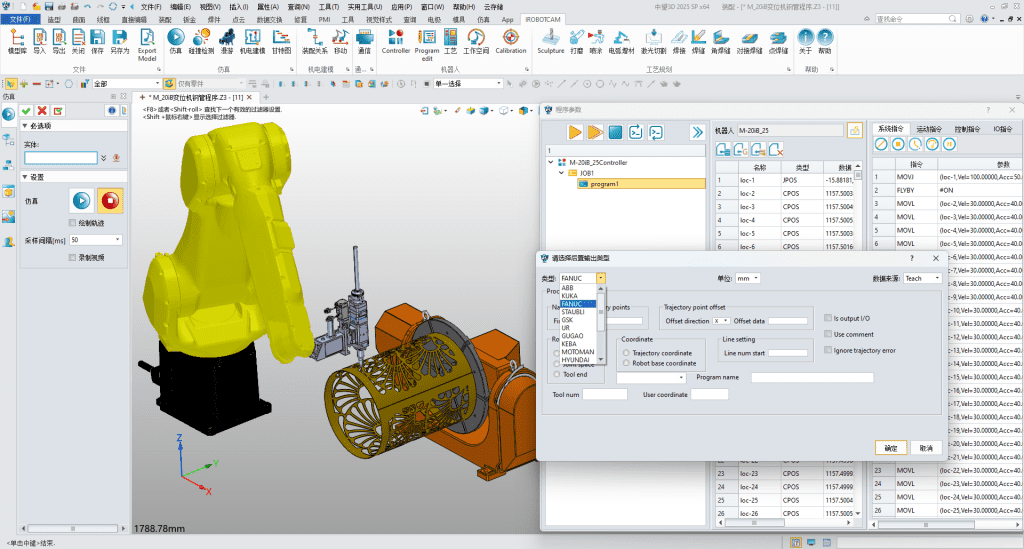
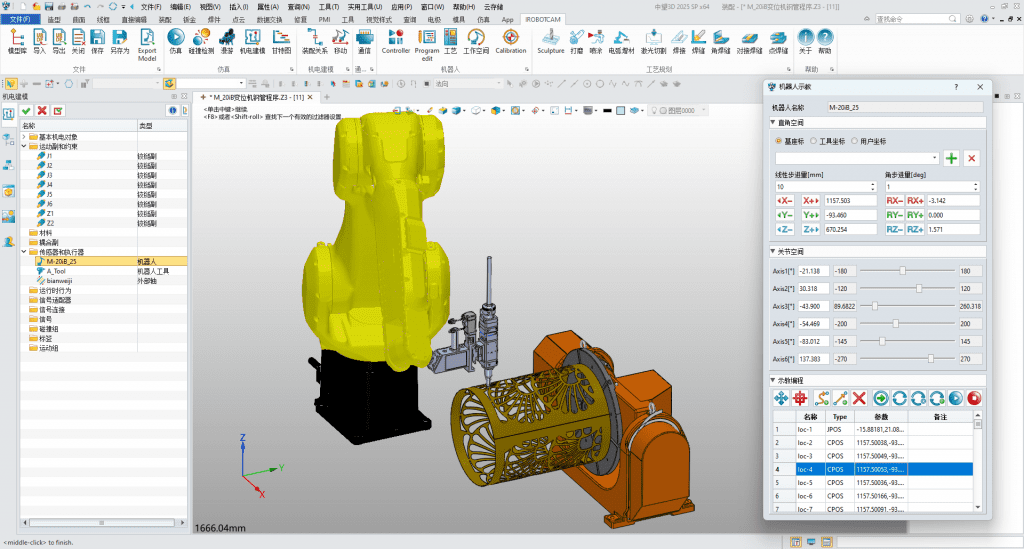
Voyons maintenant comment iRobotCAM utilise des robots pour réaliser l’usinage de motifs creux 5 axes. Grâce à la flexibilité de programmation d’iRobotCAM, il est possible de générer des trajectoires 5 axes et de simuler rapidement des robots.
5. Résumé
L’application de la technologie laser repose sur la précision, qui nécessite programmation et simulation pour concevoir une architecture de haute précision. Les cas d’application typiques de machines d’usinage laser 5 axes et de robots d’usinage laser multiaxes présentés ci-dessus montrent que le choix d’iRobotCAM comme solution d’usinage laser et de débogage virtuel peut résoudre efficacement le problème de haute précision inhérent à l’usinage laser. En outre, iRobotCAM, en tant qu’application de processus d’usinage laser, peut étendre son champ d’application à d’autres scénarios, notamment la découpe laser, le placage laser et la fabrication additive à l’arc, grâce à l’ouverture de son architecture technique et à ses avantages techniques évidents en matière de haute précision.
À propos de Yueqing Technology
Yueqing Technology s’engage à construire une plate-forme de programmation hors ligne de robot iRobotCAM ouverte, qui est une solution numérique intégrant la conception conceptuelle électromécanique des lignes de production, la simulation de programmation de traitement de robot et le débogage virtuel.
Site Web d’iRobotCAM : www.iRobotCAM.com ; Contact : cooperation@iRobotCAM.com


