Riassunto: L’impiego di robot collaborativi contribuisce a liberare una grande quantità di lavoro manuale ripetitivo e a migliorare significativamente l’efficienza produttiva. La base di varie applicazioni di robot collaborativi risiede nella programmazione e nella simulazione. Grazie al software di programmazione offline per robot domestici iRobotCAM, robot collaborativi come Yuejiang possono essere rapidamente utilizzati per realizzare la programmazione e la simulazione virtuale di robot.
Grazie alla crescente flessibilità delle applicazioni robotiche, in particolare all’elevato grado di libertà e all’elevata precisione dei robot collaborativi, settori come l’aviazione, l’automotive e l’elettronica hanno adottato un gran numero di robot collaborativi per liberare il lavoro manuale ripetitivo e migliorare significativamente l’efficienza produttiva. La programmazione e la simulazione di vari scenari collaborativi di robot sono alla base delle applicazioni di robot collaborativi. Questo articolo presenterà iRobotCAM, un software di programmazione offline per robot domestici sviluppato sulla base di una piattaforma di modellazione CAD 3D, e prenderà come esempio il robot collaborativo debot per spiegare come utilizzare rapidamente i robot collaborativi debot per realizzare la programmazione e la simulazione virtuale di saldature robotizzate.
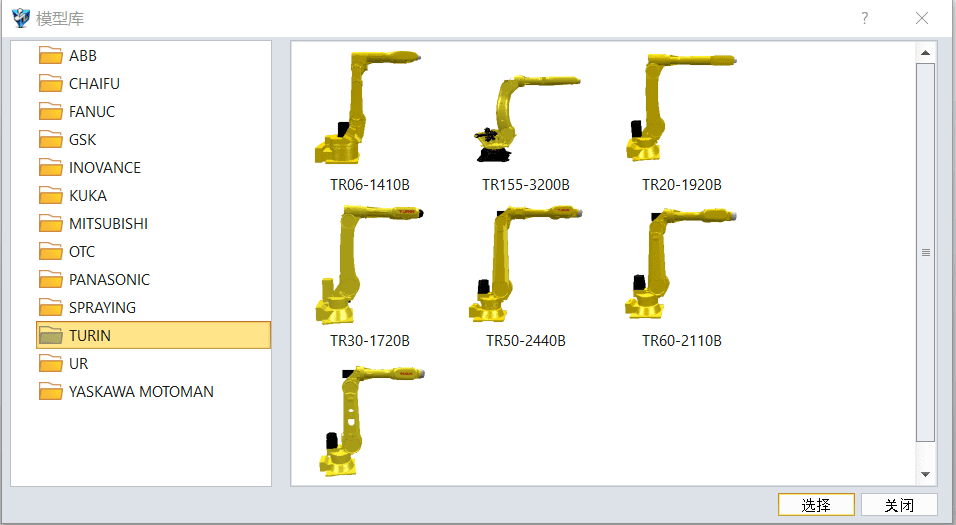
- Con la libreria robot di iRobotCAM, è possibile utilizzare librerie robot esistenti di ABB, ZF, FANUC, Guangzhou CNC, Inovance, Kuka, Mitsubishi, Panasonic, Zhihui, Turin, UR, Yaskawa e altre, oppure creare rapidamente nuove librerie robot collaborative come debot Robotics, a seconda delle esigenze. La libreria può essere creata tramite semplici definizioni di giunti.
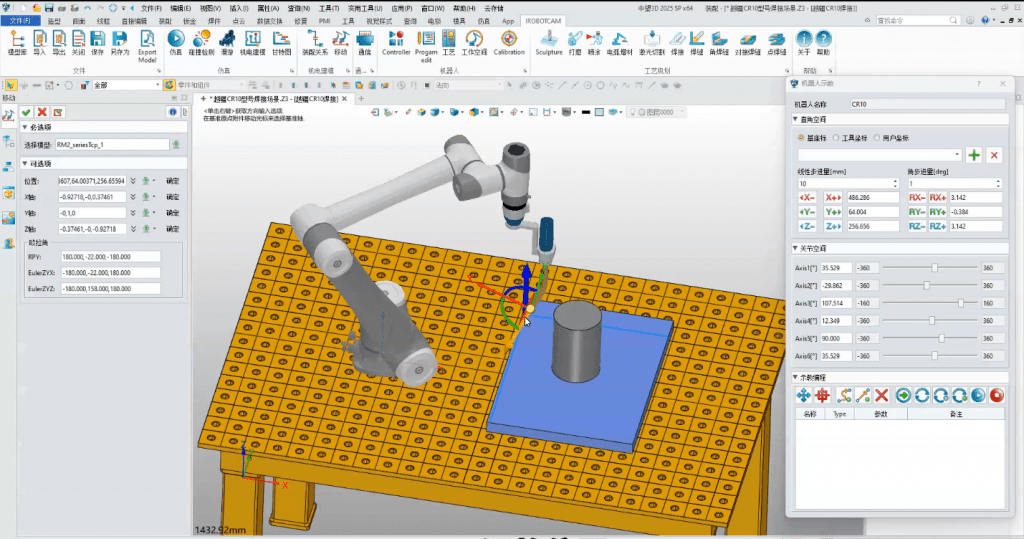
2. Utilizzare la comoda funzione di insegnamento di iRobotCAM per ottenere la programmazione didattica semplicemente trascinando e rilasciando
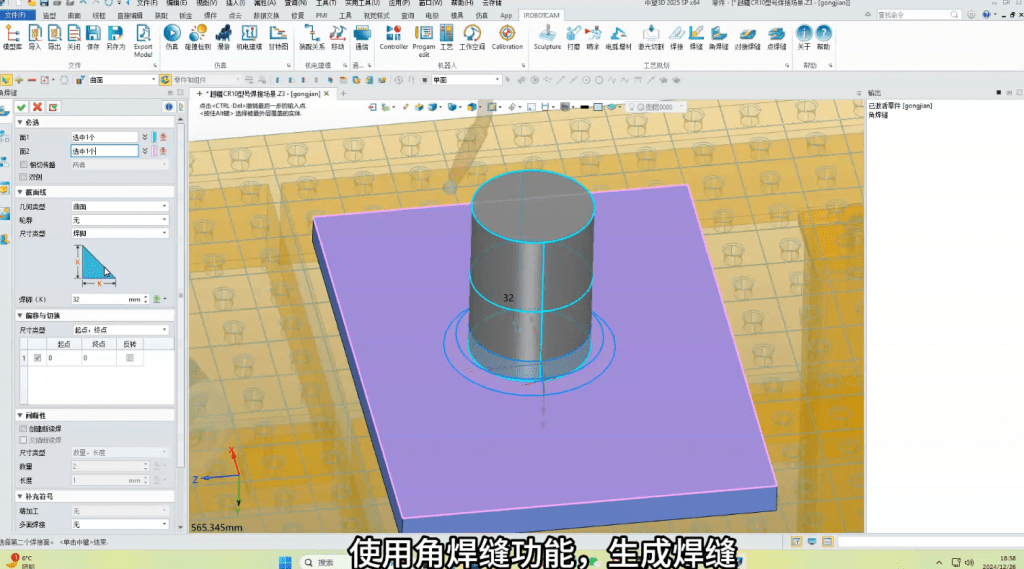
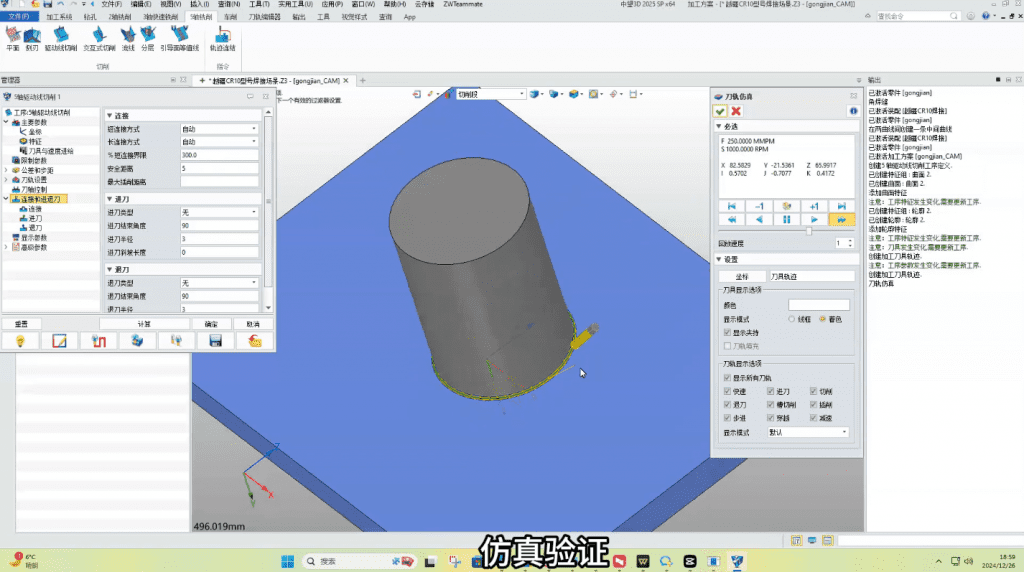
3. Utilizzando il modulo di saldatura è possibile contrassegnare rapidamente la posizione di saldatura e generare programmi di funzionalità di saldatura.
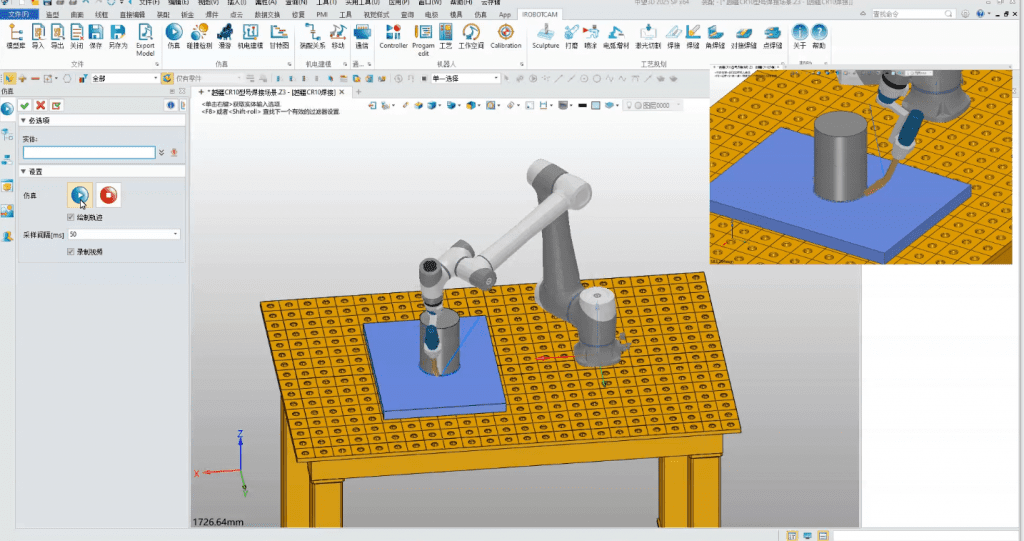
4. Utilizzando le avanzate funzionalità di traiettoria da due a cinque assi di iRobotCAM, è possibile generare rapidamente traiettorie di programmazione della saldatura e simularle.
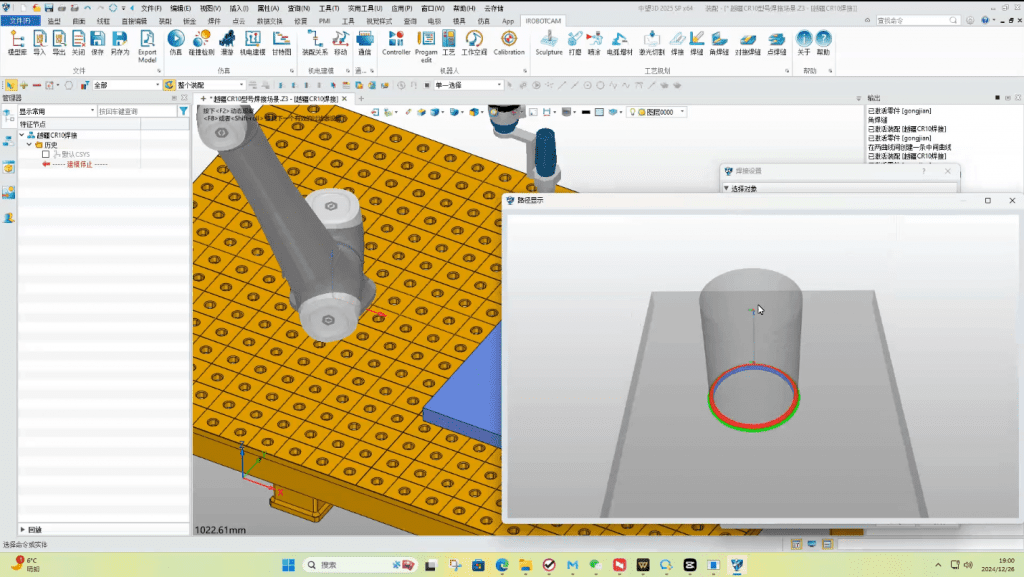
5 Utilizzando l’effetto di elaborazione della simulazione del robot di iRobotCAM, è possibile verificare e simulare ulteriormente l’effetto della saldatura del robot.
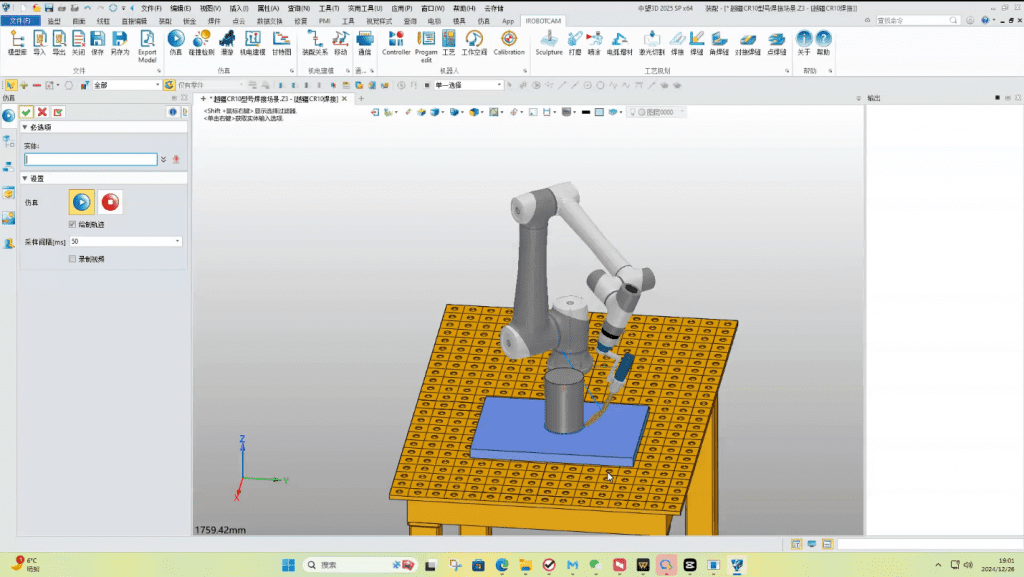
6. Per gli scenari applicativi dei robot, iRobotCAM può essere utilizzato per simulare la scena di saldatura complessiva del robot e visualizzare in modo intuitivo il processo di saldatura.
Di seguito è riportato un video che mostra la programmazione e la simulazione della saldatura utilizzando il robot collaborativo debot.
Informazioni su Yueqing Technology
Yueqing Technology è impegnata a realizzare una piattaforma aperta di programmazione offline dei robot iRobotCAM, ovvero una soluzione digitale che integra la progettazione concettuale elettromeccanica delle linee di produzione, la simulazione della programmazione dell’elaborazione dei robot e il debug virtuale.
Sito web di iRobotCAM: www.iRobotCAM.com; Contatto: cooperation@iRobotCAM.com


