Résumé : L’utilisation de robots collaboratifs permet de libérer une grande partie du travail manuel répétitif et d’améliorer considérablement l’efficacité de la production. La base de diverses applications collaboratives de robots repose sur la programmation et la simulation robotiques. Grâce au logiciel de programmation hors ligne iRobotCAM, des robots collaboratifs tels que Yuejiang peuvent être rapidement utilisés pour réaliser la programmation robotique et la simulation virtuelle.
Avec la flexibilité croissante des applications robotiques, et notamment le haut degré de liberté et la haute précision des robots collaboratifs, des industries comme l’aéronautique, l’automobile et l’électronique ont adopté un grand nombre de robots collaboratifs pour alléger le travail manuel répétitif et améliorer considérablement l’efficacité de la production. La programmation et la simulation de divers scénarios collaboratifs robotisés constituent la base des applications robotiques collaboratives. Cet article présente iRobotCAM, un logiciel de programmation hors ligne de robots domestiques développé à partir d’une plateforme de modélisation CAO 3D. Il prend l’exemple du robot collaboratif Debot pour expliquer comment utiliser rapidement les robots collaboratifs Debot pour réaliser la programmation et la simulation virtuelle de robots de soudage.
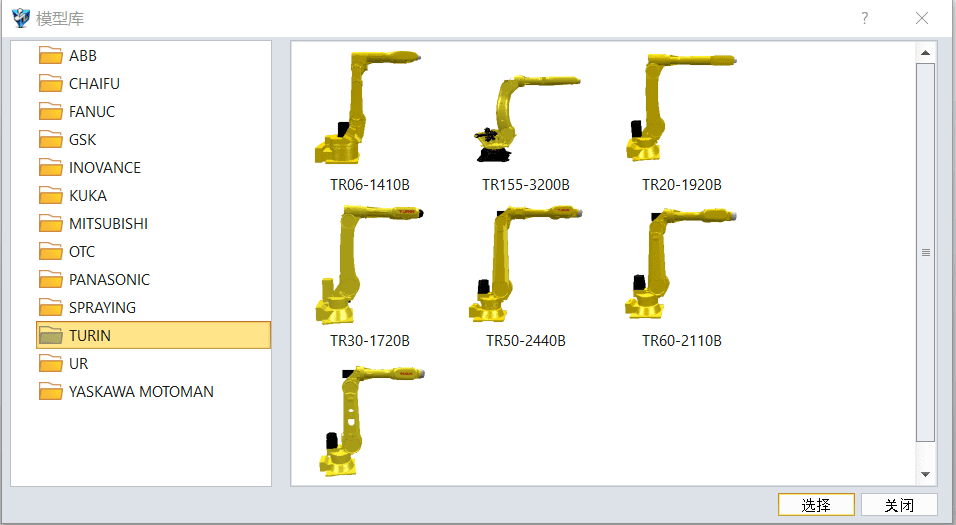
- Grâce à la bibliothèque robotique d’iRobotCAM, vous pouvez utiliser les bibliothèques robotiques existantes d’ABB, ZF, FANUC, Guangzhou CNC, Inovance, Kuka, Mitsubishi, Panasonic, Zhihui, Turin, UR, Yaskawa et d’autres, ou créer rapidement de nouvelles bibliothèques robotiques collaboratives, comme debot Robotics, selon vos besoins. La bibliothèque peut être créée par de simples définitions d’articulations.
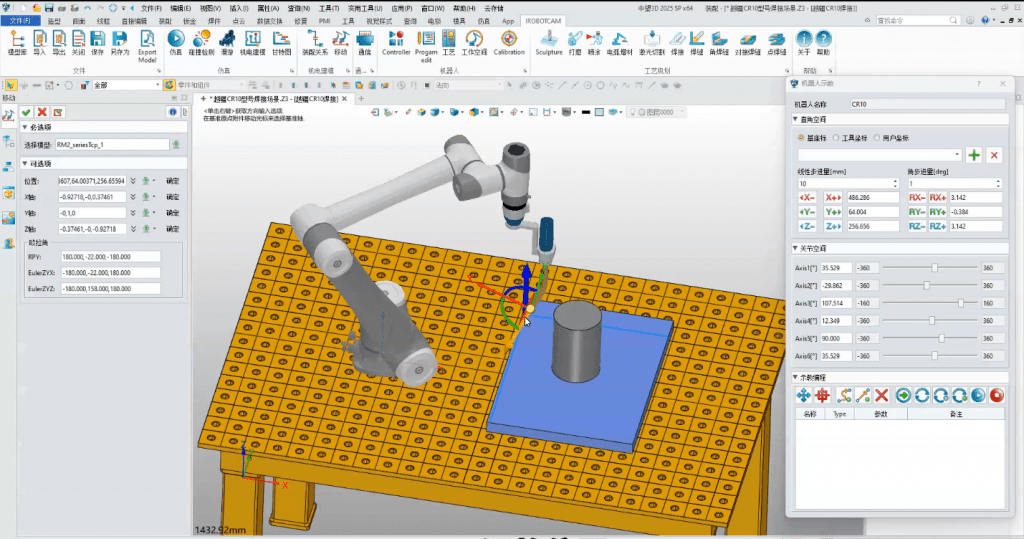
2. Utilisez la fonction d’enseignement pratique d’iRobotCAM pour réaliser la programmation d’enseignement par simple glisser-déposer
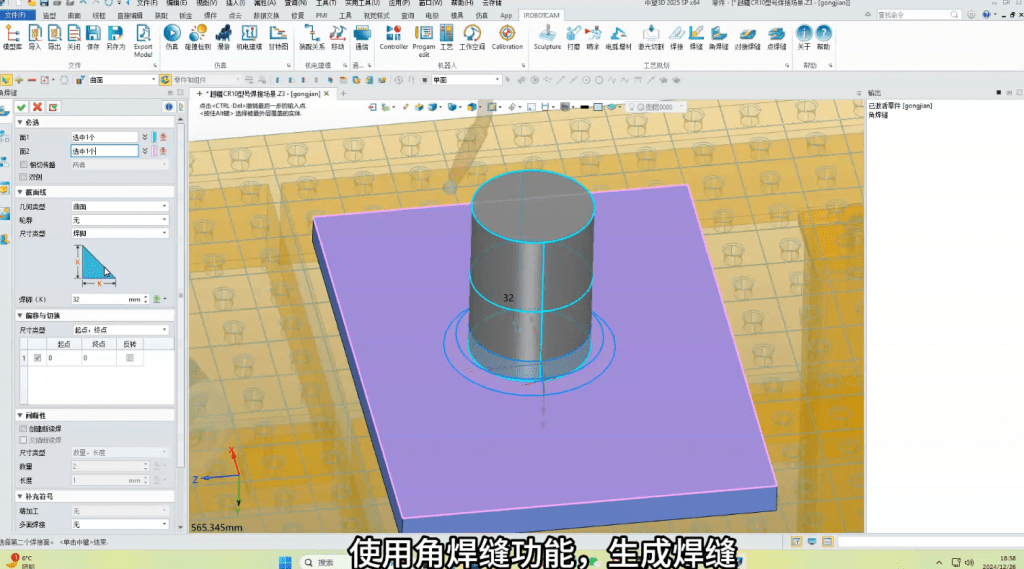
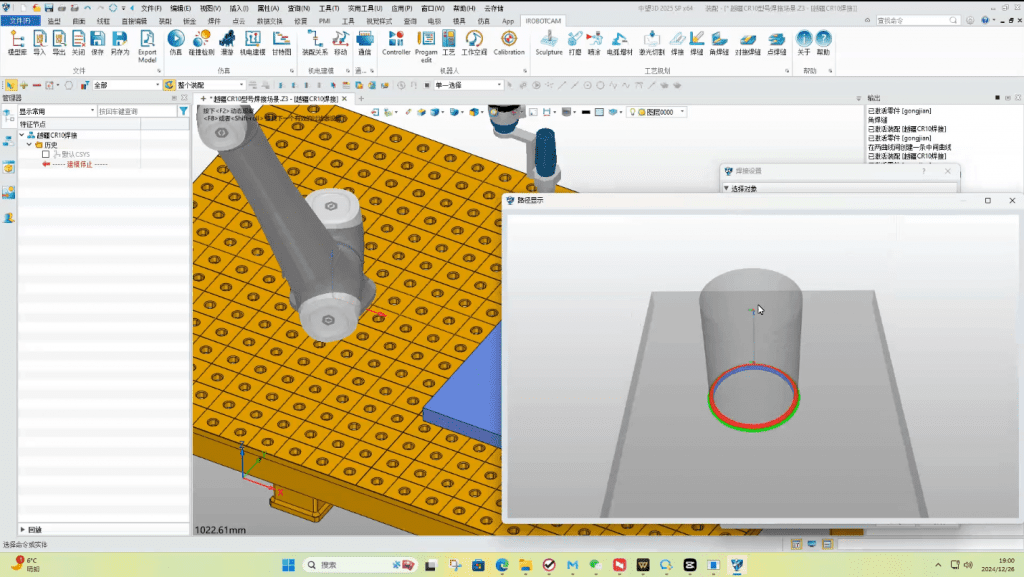
3. À l’aide du module de soudage, vous pouvez rapidement marquer la position de soudage et générer des programmes de fonctions de soudage.
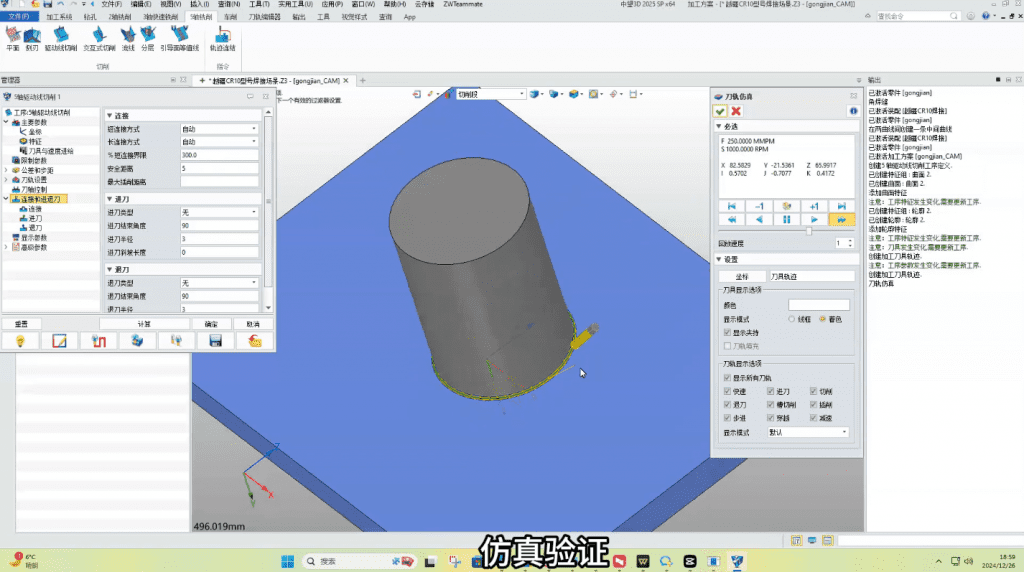
4. Grâce aux riches capacités de trajectoire à deux à cinq axes d’iRobotCAM, vous pouvez rapidement générer des trajectoires de programmation de soudure et simuler les trajectoires.
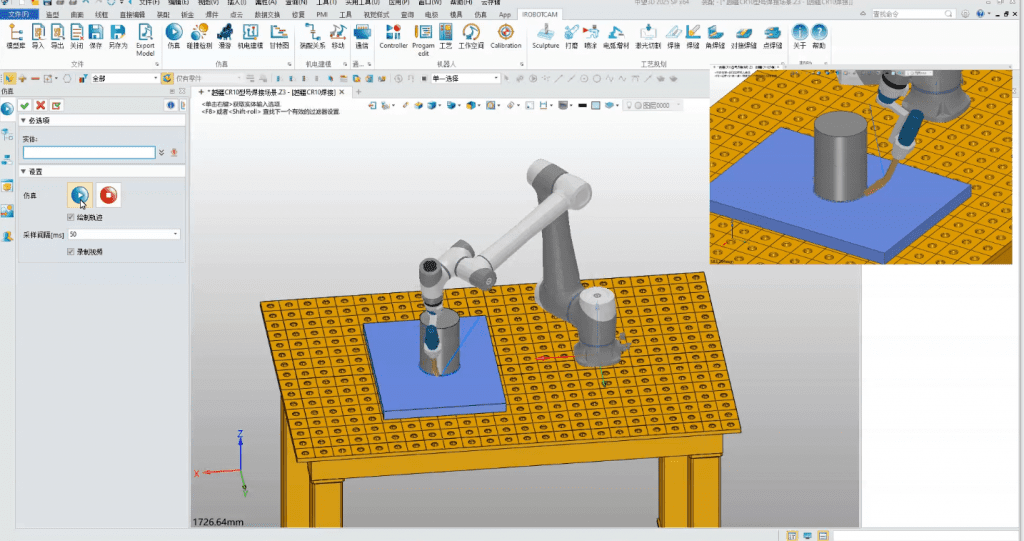
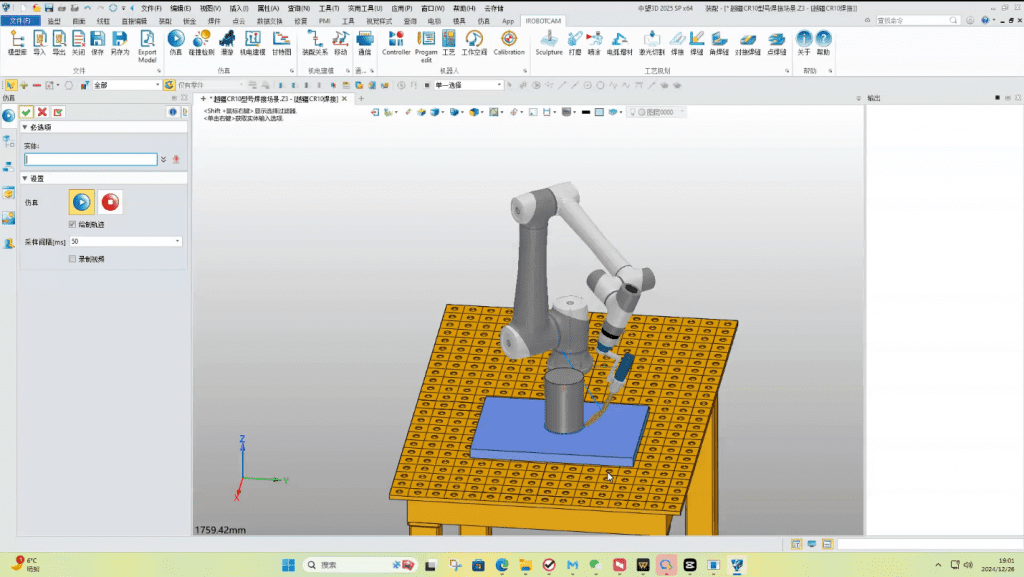
Grâce à l’effet de traitement de simulation de robot d’iRobotCAM, l’effet de soudage du robot peut être davantage vérifié et simulé.
6. Pour les scénarios d’application robotique, iRobotCAM peut être utilisé pour simuler la scène de soudage globale du robot et visualiser intuitivement le processus de soudage.
Voici une vidéo montrant la programmation et la simulation du soudage à l’aide du robot collaboratif debot.
À propos de Yueqing Technology
Yueqing Technology s’engage à construire une plate-forme de programmation hors ligne de robot iRobotCAM ouverte, qui est une solution numérique intégrant la conception conceptuelle électromécanique des lignes de production, la simulation de programmation de traitement de robot et le débogage virtuel.
Site Web d’iRobotCAM : www.iRobotCAM.com ; Contact : cooperation@iRobotCAM.com


