Résumé : Visant les scénarios d’application de l’automatisation des unités matérielles des robots, iRobotCAM, un logiciel de programmation hors ligne de robots domestiques développé par YueQing Technology, fournit un module de conception d’unités matérielles pratique, qui peut rapidement établir une communication avec l’API et réaliser l’automatisation en fonction des besoins des unités matérielles.
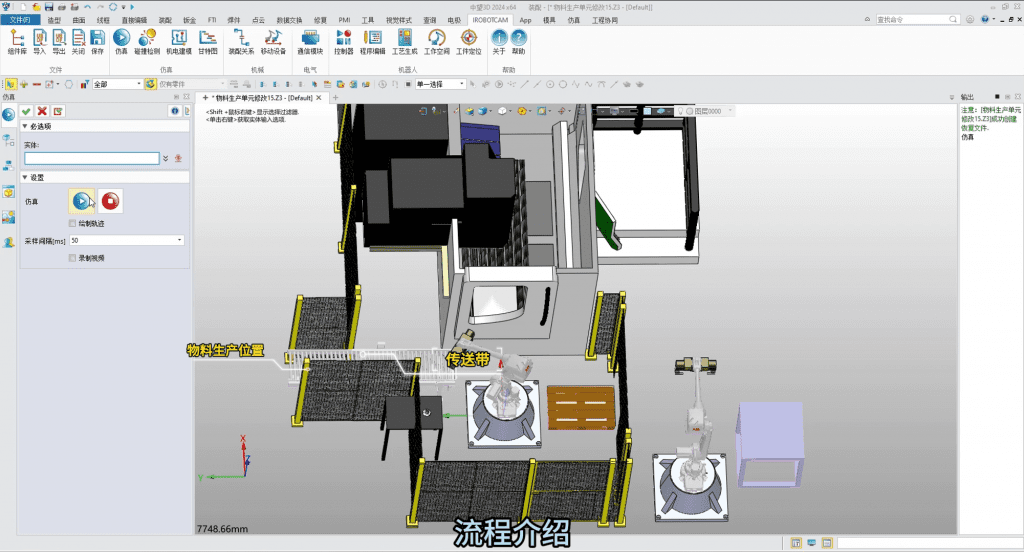
Pour la conception et la simulation d’une ligne de production robotisée, l’unité de production de matériaux a élaboré des méthodes de conception pour différents composants de manière pratique. Pour en revenir à la source, du point de vue du flux global de matériaux, le processus de la plupart des scénarios de matériaux de base est similaire au mode suivant :
- Dans la scène, l’entrée du tapis roulant produit des matériaux, transporte les matériaux jusqu’à la fin, détecte les matériaux à la fin et le tapis roulant s’arrête de fonctionner.
- Le robot dans la zone de chargement reçoit le signal pour fixer le matériau sur la machine-outil pour le traitement et le chargement, et le place finalement sur la plaque transporteuse pour le transport.
- Le robot dans la zone de déchargement attend que la plaque transporteuse transporte le matériau et, après avoir obtenu le signal, fixe le matériau sur la table de placement du matériau.
- L’entrée du tapis roulant continue de produire des matériaux et le robot entre dans le cycle de chargement et de déchargement.
La conception fonctionnelle est très pratique. L’unité de production de matériaux est capable de générer automatiquement des matériaux pour diverses lignes de production. La fenêtre fonctionnelle de l’unité de production de matériaux est définie en intégrant les objets de production, les sites de production et les fréquences de production.
Ses capacités d’extension fonctionnelle sont remarquables. Spécifiquement adapté aux exigences de l’unité matérielle, le puissant moteur physique d’iRobotCAM répond aux exigences de la simulation de mouvements multi-robots, même dans les scénarios les plus complexes.
Prenons l’exemple du chargement et du déchargement de robots. iRobotCAM permet de mettre en œuvre rapidement les conceptions suivantes :
tout d’abord, importer le modèle de robot dans la scène depuis la bibliothèque de composants et l’assembler au robot en paramétrant séparément les outils.
Ensuite, le logiciel permet d’ajouter des marqueurs par glisser-déposer, ainsi que des instructions de programme robot, contrôlant ainsi l’exécution des fonctions de chargement et de déchargement par le programme robot.
Enfin, plusieurs robots peuvent être ajoutés à la scène, et les instructions de programme robot sont gérées par le contrôleur multi-robots pour exécuter respectivement les fonctions de chargement et de déchargement.
En tant qu’unité de production de matériaux, nous explorerons plus en détail comment iRobotCAM réalise facilement l’automatisation de l’unité de matériaux du robot via la vidéo suivante.
À propos de Yueqing Technology
Yueqing Technology s’engage à construire une plate-forme de programmation hors ligne de robot iRobotCAM ouverte, qui est une solution numérique intégrant la conception conceptuelle électromécanique des lignes de production, la simulation de programmation de traitement de robot et le débogage virtuel.
Site Web d’iRobotCAM : www.iRobotCAM.com ; Contact : cooperation@iRobotCAM.com


