Riepilogo: La difficoltà della lavorazione tramite deposizione laser robotizzata per la lavorazione di pezzi complessi come le pale risiede nell’utilizzo di caratteristiche di alta precisione, e i vantaggi dell’architettura tecnica di iRobotCAM basata sul kernel CAD 3D possono soddisfare efficacemente i requisiti di alta precisione, in modo da realizzare una lavorazione di deposizione laser ad alta precisione di pale a cinque assi.
La progettazione e la lavorazione delle pale devono essere adattate a scenari specifici in base a diversi scenari applicativi, dalle piccole pale dei ventilatori alle pale aeronautiche, a seconda dei diversi scenari applicativi dei prodotti industriali. Gli elementi di design sono diversi, alcuni richiedono un’estetica accattivante, altri un design silenzioso, altri ancora prestazioni elevate. Se la pala soddisfa i requisiti di diversi settori, così come i requisiti di diversi metodi di processo, il fulcro è il controllo della precisione, solo l’accuratezza è controllata efficacemente. Esiste un modo per soddisfare le esigenze di diversi scenari. Prendendo ad esempio la lavorazione robotica di deposizione laser delle pale, iRobotCAM sfrutta la sua architettura basata su CAD e offre i vantaggi di un’architettura ad alta precisione. Come applicarla efficacemente alla lavorazione di deposizione laser?
Per le applicazioni di elaborazione laser robotizzata, il processo usuale è il seguente:
Importa robot e pezzo in lavorazione > posizionamento del pezzo in lavorazione e calibrazione del robot > realizzazione della programmazione della traiettoria > simulazione di tutte le scene > output del codice ed elaborazione del robot
- Utilizzando le caratteristiche di iRobotCAM basate sulla piattaforma CAD 3D e guardando in 3D, è possibile stabilire rapidamente un modello digitale dello scenario applicativo del robot
- Utilizzando il modulo elettromeccanico di iRobotCAM e la libreria robot preimpostata, è possibile definire robot, strumenti, ecc. pertinenti per la scena robotica
- In base alle esigenze del processo di elaborazione laser, vengono generate varie traiettorie da 2 a 5 assi per soddisfare i requisiti di traiettoria di scenari specifici
- Grazie al motore fisico di iRobotCAM, il movimento del robot viene simulato e calibrato e viene prodotto il codice di esecuzione corrispondente.
Oltre all’architettura tecnica, la percezione più diretta dell’utente è la facilità di programmazione del software del robot, e l’esperienza utente è uno degli indicatori chiave. Francamente, il progresso del software industriale non è un lavoro da giorno, ma dall’architettura tecnica all’esperienza utente, il software industriale nazionale ha fatto grandi progressi negli ultimi anni. Con così tanti anni di software straniero, si può provare un software industriale nazionale; per la scelta del software di programmazione offline del robot, si può provare iRobotCAM.
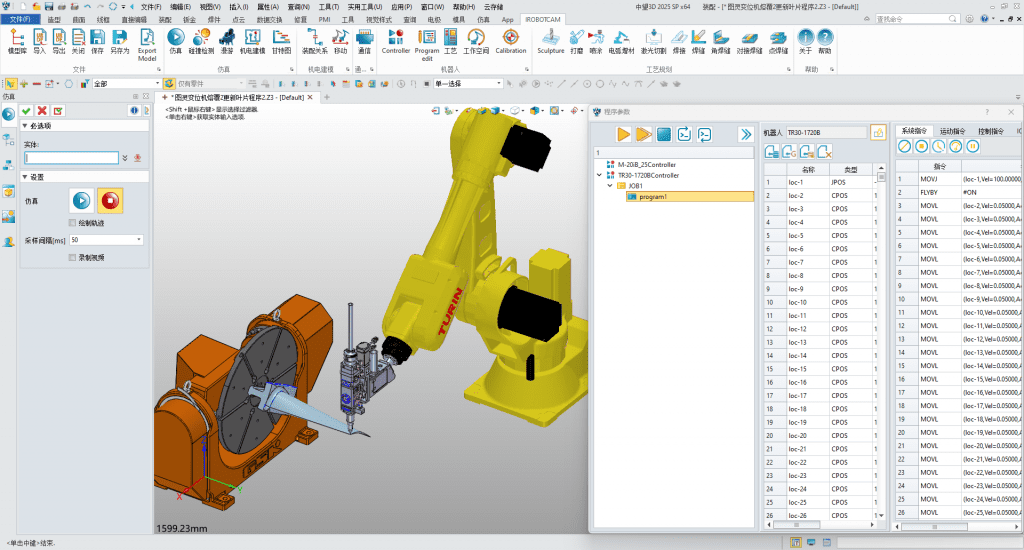
Prendendo come esempio l’impiego del robot di Torino per realizzare la lavorazione laser cladding di pale a cinque assi, in che modo iRobotCAM realizza facilmente la lavorazione laser del robot passo dopo passo?
Informazioni su Yueqing Technology
Yueqing Technology è impegnata a realizzare una piattaforma aperta di programmazione offline dei robot iRobotCAM, ovvero una soluzione digitale che integra la progettazione concettuale elettromeccanica delle linee di produzione, la simulazione della programmazione dell’elaborazione dei robot e il debug virtuale.
Sito web di iRobotCAM: www.iRobotCAM.com, contatto: cooperation@iRobotCAM.com


