概要:协作机器人的应用有助于解放大量重复的人力工作,大幅提升生产效率。而各种机器人协作的应用的基础在于机器人编程与仿真,通过全国产的机器人离线编程软件iRobotCAM,可以快速的利用如越疆等协作机器人实现机器人的编程与虚拟仿真。
随着机器人应用的灵活度越来越高,特别是协作机器人的高自由度及高精度的能力的体现,包括航空,汽车,电子等行业都大量的采用协作机器人来解放重复的人力工作,大幅提升生产效率。各种机器人协作场景的编程与仿真是协作机器人应用的基础,本文将通过介绍基于三维CAD 中望3D 开发的全国产的机器人离线编程软件iRobotCAM,以协作机器人越疆为例,介绍如何快速的利用越疆协作机器人实现机器人的焊接编程与虚拟仿真。
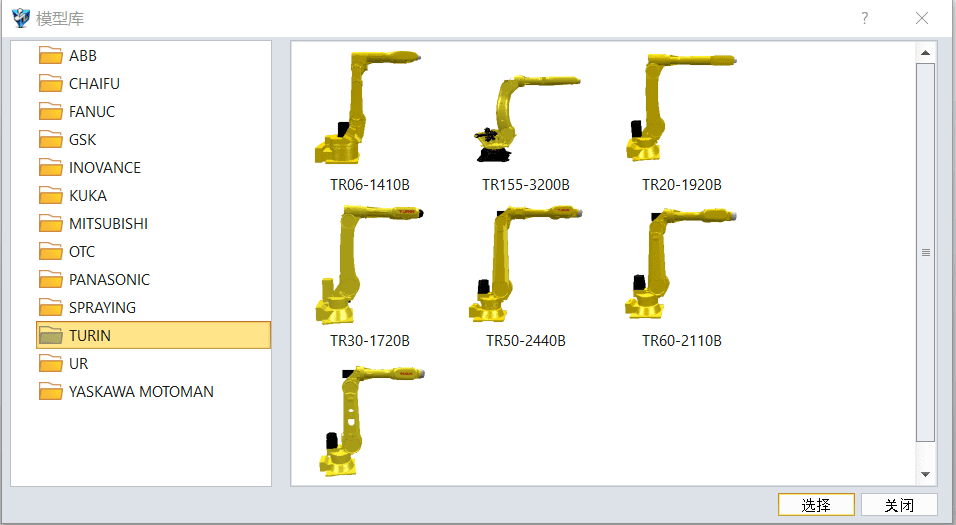
- 利用iRobotCAM的机器人库,可以利用现有的ABB, 采埃孚,发那科,广州数控,汇川,Kuka, 三菱,松下,智绘,图灵,UR,安川等机器人库,或根据需要,快速的建立新增的如越疆机器人等协作机器人库。通过简单的关节定义即可实现库的建立。
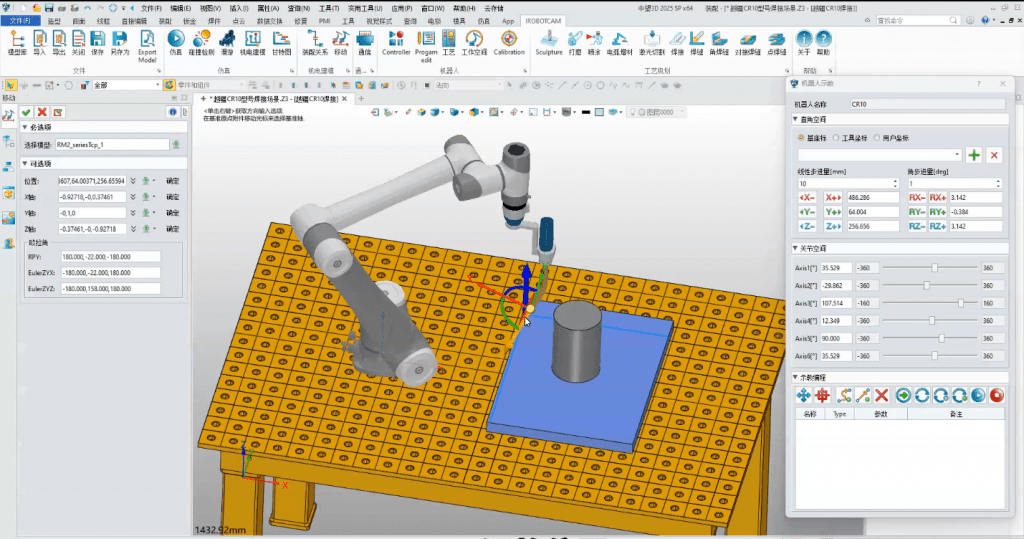
2. 利用iRobotCAM的便捷的示教功能,简单的拖拽即可实现示教编程
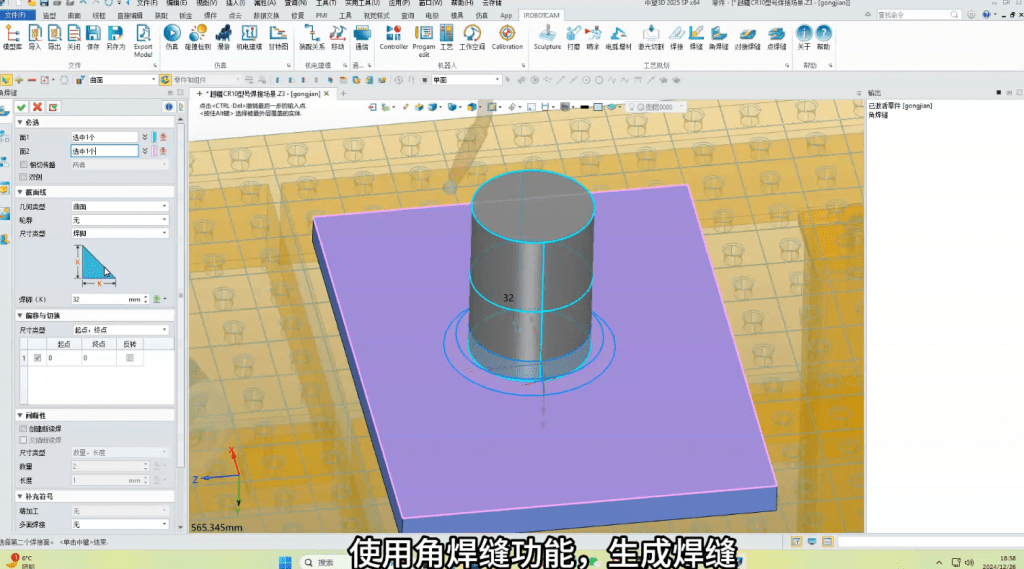
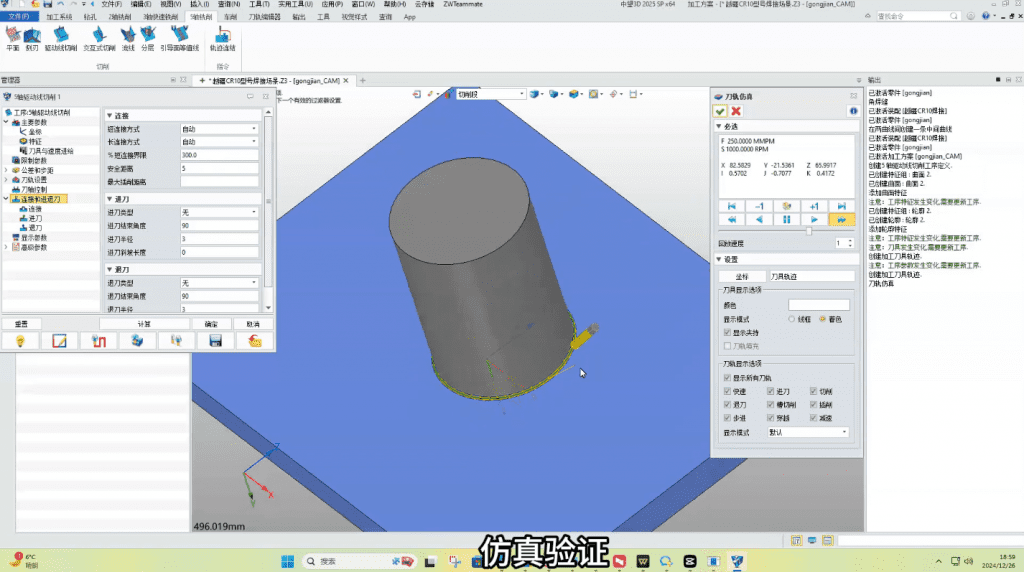
3 利用焊接模块,可以快速的标记焊缝位置及生成焊接特征
4. 利用iRobotCAM丰富的二到五轴的丰富轨迹能力,可以快速的生成焊缝编程轨迹,并对轨迹进行仿真
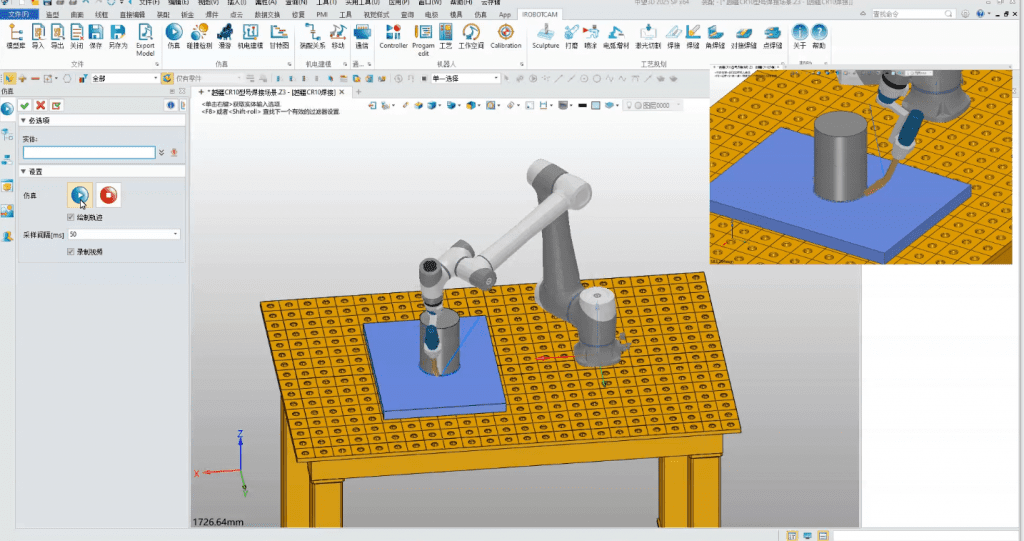
5 利用iRobotCAM的机器人仿真加工效果,可以进一步验证和仿真机器人焊接效果
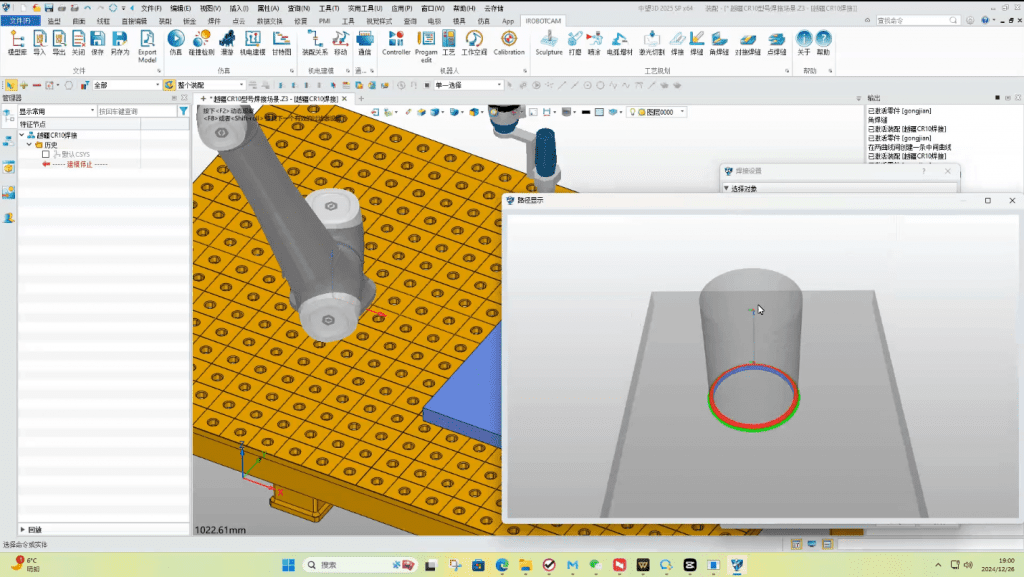
6. 针对机器人应用场景,利用iRobotCAM,可以对机器人的整体焊接场景进行仿真,直观的查看焊接的过程。
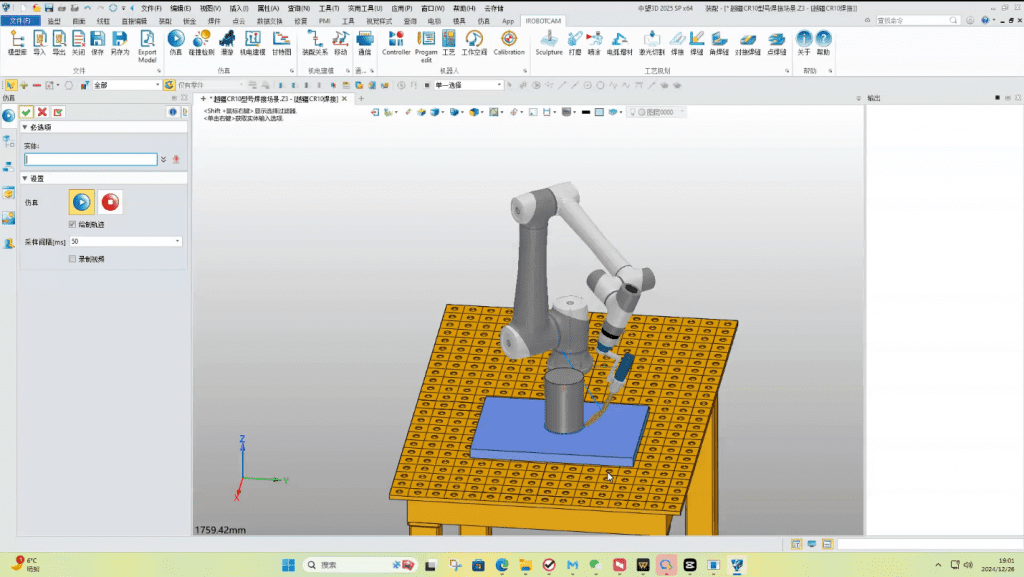
以下为利用越疆协作机器人完成焊接的编程与仿真的视频展示
联络我们,获得更多机器人应用案例
关于越擎科技:
越擎科技致力于打造开放的iRobotCAM机器人离线编程平台,是集产线机电概念设计以及机器人加工编程仿真,虚拟调试等一体的数字化解决方案.
iRobotCAM网站: www.iRobotCAM.com,联络邮件: cooperation@iRobotCAM.com


