Riepilogo: La lavorazione laser su robot è sempre più utilizzata e la rapida programmazione e simulazione della tecnologia di lavorazione robotizzata consente di verificare facilmente la correttezza del processo. In qualità di rappresentante del software di programmazione offline per robot domestici, iRobotCAM, utilizzando il suo intuitivo processo di programmazione, è in grado di raggiungere risultati di programmazione e simulazione del processo, offrendo inoltre la praticità della lavorazione laser.
La nascita di qualsiasi tecnologia di lavorazione è volta a risolvere determinati tipi di problemi nelle applicazioni industriali. L’applicazione del laser si sta diffondendo sempre di più, principalmente perché quando l’energia del laser è controllabile, è possibile realizzare tecnologie di lavorazione più complesse, in modo da poter essere utilizzata in vari tipi di taglio laser semplice da due a cinque assi, o in componenti aeronautici e di altro tipo più complessi. Il campo della saldatura laser soddisfa ulteriormente le esigenze di processo di vari tipi di componenti. Per sfruttare al meglio la lavorazione laser robotica, oltre alle capacità hardware del laser stesso, vengono richiesti ulteriori requisiti per la praticità e la precisione delle traiettorie di generazione e delle simulazioni di processo.
Per quanto riguarda la lavorazione laser robotizzata, prendendo come esempio le difficoltà della tecnologia del taglio laser, ci sono principalmente le seguenti
- Bassa efficienza di posizionamento e correzione e scarsa adattabilità : i metodi di posizionamento laser lineare o di posizionamento a resistore presentano dei limiti. L’intersezione del laser lineare è suscettibile alle interferenze e il posizionamento a resistore richiede un posizionamento preciso del pezzo. Posizionamento e correzione: se si verifica una deviazione nel posizionamento del pezzo, è facile che il posizionamento non vada a buon fine. Per pezzi di grandi dimensioni o complessi, tutti i bordi devono essere scansionati uno alla volta, il che è meno efficiente. Questi metodi di solito forniscono solo una correzione di posizione locale e hanno una scarsa adattabilità a parti speciali a forma di arco.
- Pianificazione della traiettoria del robot : sebbene la programmazione della traiettoria del robot sia flessibile, in alcune attività di taglio complesse o delicate, ottimizzare la traiettoria di movimento del robot per migliorare l’efficienza e la qualità del taglio rappresenta ancora una sfida.
- Manutenzione e calibrazione delle apparecchiature : i robot per il taglio laser utilizzano molteplici componenti di precisione, come emettitori laser, sensori e bracci robotici. La manutenzione e la calibrazione di questi componenti sono fondamentali per mantenere la precisione di taglio e prolungare la durata delle apparecchiature. Tuttavia, come eseguire regolarmente la manutenzione e la calibrazione e come intervenire rapidamente in caso di guasti sono tutti aspetti che devono essere affrontati nel processo di taglio laser robotizzato.
iRobotCAM è un software di simulazione e programmazione offline di robot che soddisfa i requisiti di processo della lavorazione laser dei robot e si basa sull’accumulo di ricerca e sviluppo nel campo della saldatura negli ultimi dieci anni.
- Utilizzando la scalabilità della piattaforma CAD tridimensionale, si realizza l’automazione dell’estrazione delle traiettorie di saldatura laser e si ottiene ulteriormente il controllo preciso delle traiettorie laser.
- Grazie ad anni di esperienza nella ricerca e nello sviluppo di motori fisici per robot, possiamo realizzare rapidamente la simulazione dei processi laser dei robot e realizzare il gemello digitale del processo di lavorazione.
- Utilizzando i moduli di generazione e ottimizzazione della traiettoria di iRobotCAM, la traiettoria del robot può essere regolata automaticamente per evitare collisioni, punti singolari e punti irraggiungibili.
- Combinando la progettazione della linea di produzione di iRobotCAM con la programmazione e la simulazione dei robot, iRobotCAM è in grado di realizzare la progettazione e la simulazione a livello di linea di produzione, ottenendo l’integrazione di progettazione e simulazione.
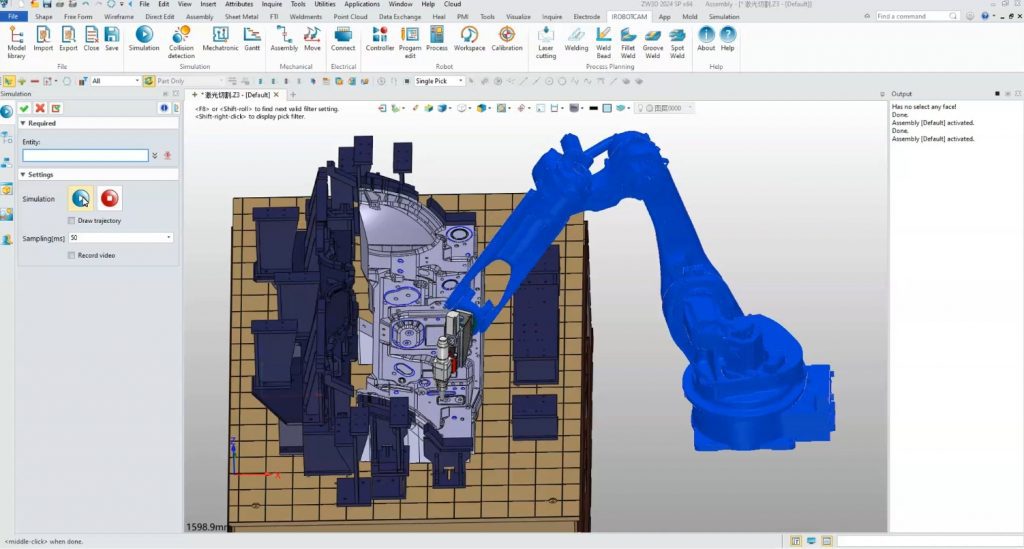
Diamo un’occhiata a come iRobotCAM può implementare facilmente la programmazione e la simulazione dell’elaborazione laser dei robot.
Informazioni su Yueqing Technology :
Yueqing Technology è impegnata a realizzare una piattaforma aperta di programmazione offline dei robot iRobotCAM, ovvero una soluzione digitale che integra la progettazione concettuale elettromeccanica delle linee di produzione, la simulazione della programmazione dell’elaborazione dei robot e il debug virtuale.


